一種基于Zigbee的路燈控制系統實現方案

4 系統功能測試
4. 1 系統測試
由于Zigbee 網絡能自組網,因此在構造試驗系統時我們配置了最小系統: 1 個網絡協調器節點和3個路由器節點,系統采用主從方式,一般處于休眠狀態,當有中斷請求時激活節點進行工作。路燈高度為0. 7m,路燈間隔為0. 8m,現場路燈系統如圖3、圖4 所示。

圖3 路燈1 微亮,2、3 全亮

圖4 路燈1,2 微亮,路燈3 全亮。
圖3 為小車運行到路燈2 位置的狀態。路燈2全亮,并通知路燈1 轉為微亮、前方路燈3 轉為全亮。若1 號節點熱釋電紅外傳感器檢測不到信號并收到了前方路燈的信息,則狀態轉為微亮; 當小車向前運行進入3 號節點熱釋電紅外傳感范圍時,3號燈通知2 號燈轉為微量,如圖4 所示,對應的監控界面如圖5 所示。監控界面中淡黃色路燈表示路燈微亮、深黃色路燈表示路燈全亮。
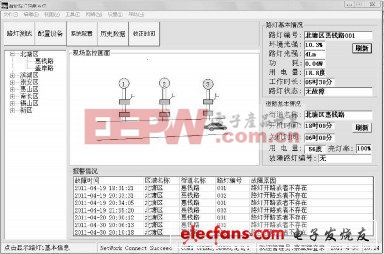
圖5 監控界面。
運行路燈控制系統軟件時需要進行系統配置、通信配置、Zigbee 配置等操作; 在運行中可對路燈節點進行調光、校正時間等操作。如圖6 為系統工作時間設置,圖7 為路燈節點時間校正。
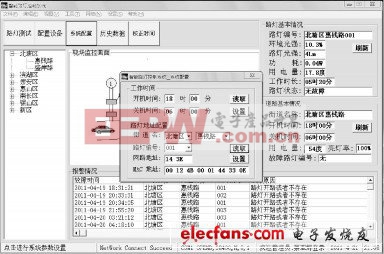
圖6 系統工作時間設置。

圖7 系統校正時間。
4. 2 系統功能
路燈控制方式可分為手動控制方式和自動控制方式,均可在監控中心操作或進行參數設置。系統可實現以下功能:
1) 可進行單燈遠程監控,并可調節燈具亮度。
2) 可根據環境光自動開關路燈,并可調整燈具亮度,保證使用需要。
3) 根據道路是否有行人/車輛通過實現亮度漸變。路燈夜間無行人/車輛通過,路燈微亮; 當檢測到遠方有行人/車輛接近時,路燈由微亮轉為全亮,并通知前方路燈由微量轉為全亮;車輛/行人通過后,路燈又轉為微亮。
4) 具有路燈故障檢測功能。當有路燈損壞,可以進行聲光報警,并指示故障路燈的具體位置。
5) 具有數據統計和存儲功能。可提供路燈用電量、亮燈率和功耗等數據,并可查詢歷史記錄。
6) 系統具有休眠狀態,降低系統功耗。
5 結束語
智能化和網絡化控制路燈是未來路燈控制的發展方向和必然趨勢。隨著技術的進步和城市發展的需求,無線傳感節點集成度會越來越高,價格會越來越低,路燈控制系統的功能會越來越多,路燈的自動化管理和無線通信技術的結合應用也必然會越來越廣泛。
本系統采用Zigbee 協議實現了路燈控制模擬系統的實時監控和網絡化管理。系統網絡擴展靈活、現場易于安裝,操作界面友好、管理方便。本系統已用于自動化類專業的大學生實驗實訓教學,有助于學生了解無線通信、傳感技術、單片機技術及其在城市路燈控制系統中的應用。







評論