嵌入式電鐓智能控制設計

3 電鐓機控制特性分析
3.1 電鐓常見缺陷
氣門毛坯成型過程中,由于各方面的參數影響,會出現不同類型的廢品,主要缺陷有:頭部有裂紋、頂部出現折疊、成型歪斜不均勻。
當毛坯成形時棒料過熱、變形量大,在附加拉應力的作用下產生軸向裂紋。折疊產生原因是始鐓溫度與終鐓溫度相差較大,金屬*結合不好,有明顯的分界線,形成臺階狀的折疊。而成型歪斜是由于砧子塊棒料接觸電阻相差懸殊,造成兩邊電流不均勻,棒料過多地流向溫度高的一側,引起歪斜。
從上面分析可見,常見缺陷成因主要可以歸結為:壓力不穩定,電流不均勻,驅動系統有時滯性。
3.2 氣液結合驅動
電鐓機振動本身是復雜的非線性系統,無法獲得精確的數值解,為建立電鐓機的振動力學模型,在此做如下假設:
(1)將電鐓機機身、工件、砧子缸看作剛性質量塊;忽略電鐓機連接及驅動部件之間的間隙對電鐓機振動的影響。
(2)將電鐓機機身及鐓粗缸等效為線性彈簧。
(3)只考慮電鐓機縱向方向的振動。
由工程振動理論知:振動系統受到激勵發生的振動,是由有阻尼自由振動與穩態振動組成的。如圖3所示為電鐓機等效彈簧一質量系統簡圖,k為彈簧剛度,c為粘性阻尼系數,F為一階躍激勵,所謂階躍激勵就是受到常力F的突然作用,即F(t)=F。

系統的運動微分方程為:
阻尼比ξ的大小可以用來表示振幅衰減的快慢,阻尼比越大,振幅的衰減越快;阻尼比越小,則超調量越大。由于液壓缸彈簧剛度k值遠大于氣缸k值,故液壓缸系統阻尼比小于氣缸系統阻尼比,可以判斷在同樣階躍激勵作用下,液壓系統振動更厲害。
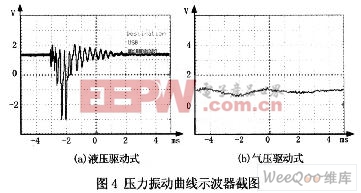
在嵌入式智能電鐓機上,選擇了氣液結合驅動。氣液聯合驅動是指以壓縮空氣為動力源,通過氣液轉換元件將氣體動力轉換成液體動力的驅動方式。在本系統中,采用氣液聯動驅動砧子塊,鐓粗缸采用直接氣體動力驅動。圖4是在鐓粗缸換向時,壓力傳感器測得的壓力振動曲線示波器截圖。液壓驅動式鐓粗缸振動幅值比氣體驅動大25倍,振蕩次數超過10次。實驗證明,氣液結合驅動系統壓力穩定性好。
4 模糊自整定PID控制策略
電鐓控制系統屬于非線性時滯系統,涉及溫度、壓力、電流等參數的控制。用常規的PID控制器,難以達到較好的效果。模糊PID是將模糊控制與經典PID控制相結合的控制器,適用毛非線性、數學模型不確定的系統。
模糊自整定PID是在PID算法的基礎上,通過計算當前系統誤差e和誤差變化ec,利用模糊規則進行模糊推理,查詢模糊矩陣表進行參數調整。模糊控制設計的核心問題是總結設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到針對kD、ki、kd三個參數分別整定的模糊控制表。kp、ki、kd的模糊規則表建立后,再應用模糊合成推理設計PID參數的模糊矩陣表,查出修正參數帶入下式計算:

在線運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數在線自校正。

評論