基于LPC2131嵌入式系統(tǒng)μCOS-II實現(xiàn)CAN通訊

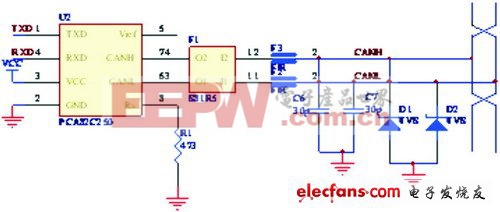
圖2 CAN收發(fā)器與總線接口電路
對于其他無內(nèi)置CAN控制器的能夠承受5V的TTL電平的處理器來說,只需改變與SJA1000的數(shù)據(jù)端口ALE/AS,RD/E,WR,CS,INT,RST相連接的引腳即可完成外擴CAN接口的硬件設(shè)計工作,否則在兩者之間加一個邏輯電平轉(zhuǎn)換的器件即可。
軟件設(shè)計
對SJA1000的讀寫訪問
由于LPC2131的48個引腳全是IO,所以首先需要通過軟件模擬讀寫SJA1000的時序,來對SJA1000進(jìn)行操作,進(jìn)而完成CAN通訊功能。
依據(jù)SJA1000在Intel模式下的讀寫時序[4],可編寫LPC2131通過CAN控制器SJA1000發(fā)送數(shù)據(jù)的寫函數(shù)void WriteCan(uint8 Addr,uint8 Data)和接受CAN控制器所接受的數(shù)據(jù)的讀函數(shù)uint8 ReadCan(uint8 Addr),其中Addr為SJA1000相應(yīng)的寄存器的地址,Data為LPC2131所發(fā)送的數(shù)據(jù),讀函數(shù)ReadCan可返回所接受的數(shù)據(jù)。
CAN通訊的實現(xiàn)
要實現(xiàn)一個CAN通訊需要實現(xiàn)3個功能模塊:對SJA1000的初始化模塊;數(shù)據(jù)發(fā)送模塊;數(shù)據(jù)接受模塊。
·對SJA1000的初始化模塊
在開始通訊之前,首先要在SJA
1000的各個功能寄存器進(jìn)行設(shè)置,包括模式寄存器,波特率,時鐘分頻器,中斷使能寄存器,,濾波寄存器,輸出控制寄存器。
uint8 IniSJA1000(uint8 BTR0,uint8 BTR1)
{
IO0CLR=CS; //片選SJA1000
WriteCan(0,0x09); //進(jìn)入復(fù)位模式
WriteCan(31,0xe8); //設(shè)置時鐘分頻器
WriteCan(4,0xfd); //設(shè)置中斷使能寄存器
WriteCan(16,AcceptCode1);//設(shè)置驗收代碼1
WriteCan(17,AcceptCode2);//設(shè)置驗收代碼2
WriteCan(18,AcceptCode3);//設(shè)置驗收代碼3
WriteCan(19,AcceptCode4);//設(shè)置驗收代碼4
WriteCan(20,MaskCode1); //設(shè)置驗收屏蔽1
WriteCan(21,MaskCode2); //設(shè)置驗收屏蔽2
WriteCan(22,MaskCode3); //設(shè)置驗收屏蔽3
WriteCan(23,MaskCode4); //設(shè)置驗收屏蔽4
WriteCan(6,BTR0); //設(shè)置總線時序寄存器1
WriteCan(7,BTR1); //設(shè)置總線時序寄存器2
WriteCan(8,0xfa); //設(shè)置輸出控制積存器
WriteCan(0,0x08); //進(jìn)入操作模式
OSCANMbox=OSMboxCreate(0);/建立CAN通訊郵箱
if (OSCANMbox==NULL)
{
return FALSE;
}
return TRUE;
}
·數(shù)據(jù)發(fā)送模塊
假設(shè)要發(fā)送的數(shù)據(jù)的ID存儲在數(shù)組ID[4]中,數(shù)據(jù)存儲在數(shù)組SendData[8]中,其發(fā)送模塊程序如下所示,其中參數(shù)DLC為發(fā)送的字節(jié)數(shù),F(xiàn)F為幀類型,即0為數(shù)據(jù)幀,1為遠(yuǎn)程幀。
void Tx(uint8 DLC,uint8 FF)
{
uint8 i;
OS_ENTER_CRITICAL();
If (FF==0x01)
{
WriteCan(16,DLC+0x80); //數(shù)據(jù)幀
}
else
{
WriteCan(16,DLC+0xd0); //遠(yuǎn)程幀
}
WriteCan(17,ID[0]);
WriteCan(18,ID[1]);
WriteCan(19,ID[2]);
WriteCan(20,ID[3]); //TX標(biāo)識碼
for (i=0;i
WriteCan(21+i,sentdata[i]); //TX數(shù)據(jù)
WriteCan(1,0x01);//設(shè)置發(fā)送寄存器發(fā)送
OS_EXIT_CRITICAL();
}










評論