基于MSP430 單片機的智能小車尋跡模塊設計方案

4 MCU控制與算法實現
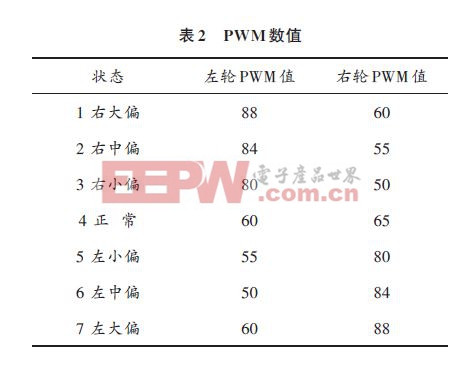
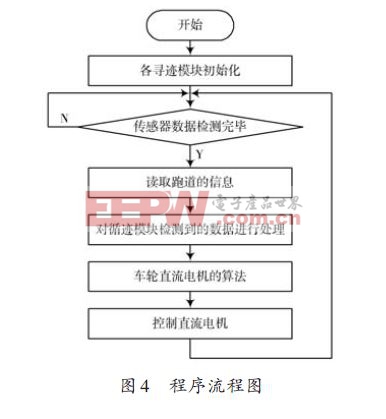
系統控制由微處理器完成,微處理器采用MSP430單片機,當單片機讀入傳感器的信號后即可判斷小車當前的行駛狀態,具體流程如圖4所示。
5 系統設計方案
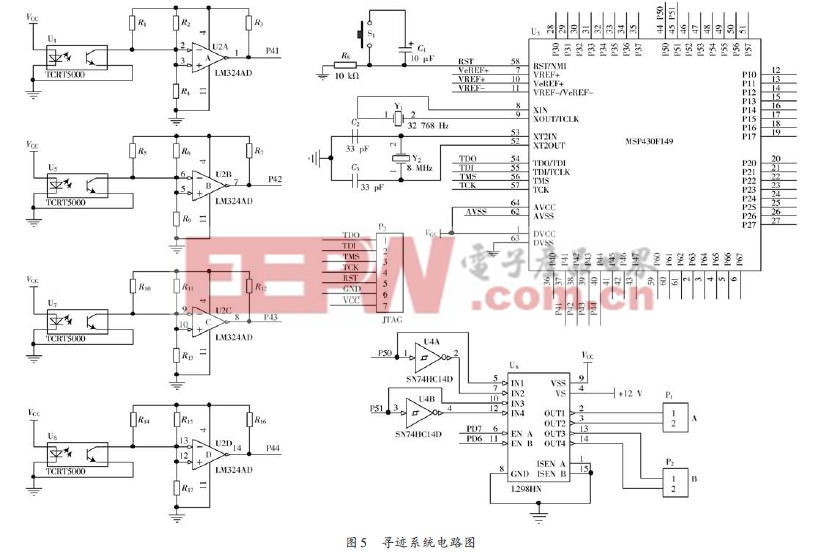
本文設計的智能小車尋跡系統的電路如圖5 所示。其中U1、U5、U7、U8 分別為反射式光電傳感器A、B、C、D,布局如圖5 所示,負責采集軌道信息。U6 為L298驅動模塊,負責控制智能小車兩側直流電機。
6 結語
本文所設計的方案通過對智能車尋跡模塊的研究,分析MSP430單片機的應用,利用感光傳感器信息來控制智能車的自動轉向,實現了智能車的自動尋跡。該尋跡系統的工作流程可概括為:通過四個外置的反射式紅外線傳感器收集軌道信息,在通過微處理器對采集到的信息進行處理,然后將處理后的信息通過PWM 信號傳遞給L298 驅動模塊,L298 模塊根據接收到的軌道信號控制智能車兩側直流電機的運行狀態,最終達到尋跡的目的。智能車在軍事、工業和民用領域的實際應用中,涉及到如何構造完整的導航系統以及多種傳感器數據融合及控制算法等,這需要在實踐中不斷研究探索
電機保護器相關文章:電機保護器原理











評論