軟件化和網絡化的基于Linux的雷達終端系統

分解過程相當于輸入序列和濾波器卷積后,進行亞采樣,只保留偶數點;合成過程相當于先對序列進行插值(添加0)后,再與濾波器卷積、相加。
圖4是一個用db1小波遞歸3次壓縮一段雷達回波的例子,壓縮接近原來的1/8。
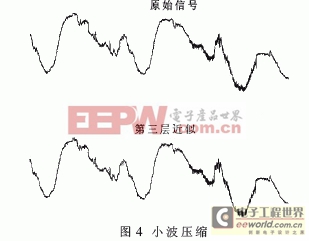
系統中采用 (9,7)雙正交小波快速提升算法,根據實際需要進行1~4層尺度分解。小波壓縮實現細節可參考文獻[2]。
2.3 網絡傳輸
常用的網絡協議是UDP和TCP。UDP是面向無連接的協議;TCP是面向有連接的協議。另外,TCP協議在接收方還要進行包的次序調整,因為不同的包可能按不同的路由到達。然而,可靠是要付出代價的,TCP占用CPU資源要比UDP高,網絡利用率也不如UDP。如果網絡狀況良好,需要持續進行大批量的數據傳輸,可以考慮UDP。一般情況下,通訊方式都是點對點的,也就是所謂的單播方式。采用這種方式,多個客戶機必須與同一個服務器分別建立連接,這導致了網絡負載成倍增加。
在特殊情形下可以使用廣播方式。其目前只被UDP協議支持。廣播的實現非常容易,只需要將目的IP地址設置為該段子網的地址即可。這種一對多的方式會影響不需要接收的主機,子網上所有未參加廣播接收的主機也必須完成對數據報的協議處理,直至UDP層才將它丟棄,甚至還會引起廣播風暴。
單播和廣播是兩種極端。多播提供了一種折衷的方案。多播數據報僅由對該數據報感興趣的主機接收(該主機加入多播組),不會影響子網上其它主機。目前UDP提供對多播的支持。
系統中,一次視頻采用多播方式;主顯示機與預處理機之間的操控命令連接通道由于需要可靠的連接且通信量相對較少,所以采用了面向連接的TCP協議。
3 主顯機系統的實現
主顯機主要由各種顯示模塊和網絡模塊組成。顯示模塊包括PPI和AR模塊。其中以PPI顯示技術最為復雜,顯示模塊和網絡模塊如何整合是系統效率高低的關鍵。
3.1雷達視頻PPI顯示
3.1.1坐標變換和死地址
顯示過程中一個很重要的步驟是進行坐標的轉換。數據采集卡得到的雷達視頻數據以距離方位為坐標,但通用顯卡的內存則以行列為坐標,故極坐標要轉化為x-y直角坐標,極坐標與自然直角坐標轉換為:

如果實時計算,目前的計算機硬件條件無法達到實時要求。可事先計算好,轉換時采用查表法,以空間換取時間。轉化表可以只計算第一象限,其它象限根據方位碼對稱性確定。
所謂死地址,是指PPI顯示中遠離顯示中心的地方會有部分區域始終訪問不到,從而產生類似于衍射花紋的現象。半徑愈大時,這種花紋愈明顯。如圖5所示。

需要把這些不能被訪問到的點“補”上。將原有的一些有重復(即多個(ρ-θ)點映射到同一個(x-y)坐標)的點分開,以最近為原則將其中的重復點強行改為“死地址”點。例如,極坐標下的兩個點M1(ρ1,θ1)和M2(ρ2,θ2),轉換為直角坐標后對應的點都是M3(x1,y1),而點M4(x2,y2)是“死地址”且M3和M4相隔很近,這時強行規定M1=>M3而M2=>M4。
系統中,不偏心時,掃描半徑是512像素,一周4096根掃描線。實踐證明可以將所有的死地址與相鄰的方位距離碼關聯起來,消除花紋圖案。可以想象:掃描半徑越大,遠離圓心的死區面積越大,其附近通常找不到能夠利用的重復點,必須改進方案。
考慮最極端的情形,偏心在圓周上,此時最大掃描半徑為1024。將半徑1024的圓分為半徑512的同心圓和剩下的外圓環。內部的小圓可以用前面的方案。512~1023部分將方位分辨率提高一倍,即一周8192根,再進行補點。具體算法如下:
(1) 得到外圓環的所有x-y坐標點的集合。
(2) 將外圓環內所有的ρ-θ點按轉換公式四舍五入到最近的x-y坐標點。有些x-y會關聯多個ρ-θ點,有些則沒有ρ-θ點與之關聯。
(3) 遍歷那些沒有ρ-θ關聯的x-y。對于每個這樣的x-y點,查找以自己為中心、邊長為4的正方形內所有的x-y點,如果發現某一個x-y點關聯ρ-θ多于一個,就將其中的一個ρ-θ給這個沒有ρ-θ關聯的x-y。同時,給出ρ-θ的x-y點,在其ρ-θ關聯鏈表中去掉給出的ρ-θ。
(4) 按ρ從512~1023、θ從0~8191的順序將對應的x-y寫入磁盤文件中。
編程計算結果表明這種算法可以很快地補全所有死地址。
相應地,原來的坐標轉換表應該由補過死地址的兩張表(一張是半徑512以內,另一張是512~1023)代替。 linux操作系統文章專題:linux操作系統詳解(linux不再難懂)








評論