軟件化和網絡化的基于Linux的雷達終端系統

1 整體實現方案
1.1 基于Linux操作系統
傳統的雷達顯示系統是基于Windows的。但是Windows面臨許多問題,譬如封閉源碼、易被病毒和黑客入侵等。而Linux是免費的、開源的、網絡化的操作系統。其內核是獨立和高度可配置的。Linux的網絡功能和安全性要優于Windows。所以基于Linux的系統方案是比較合適的。
1.2 系統實現方案
系統由預處理機、主顯機和網顯機組成,如圖1所示。
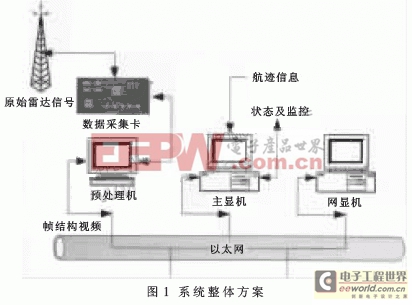
預處理機的主要功能是:雷達視頻的采集、壓縮和傳輸,接收二次信息和操控信息并存儲所有信息。主顯機功能:壓縮視頻的接收、解壓、顯示,接收二次信息并顯示,人機操控操作,將二次信息和操控信息發送到網絡上。網顯機類似于主顯機,但沒有操控功能。為簡單起見,本文不討論網顯機的實現。
2 預處理機系統的實現
預處理機完成數據的采集、壓縮和傳輸,下面針對這三個方面進行介紹。
2.1 基于PCI總線的雷達視頻采集卡
這是系統中惟一的硬件實現部分,也是必不可少的,它將采集的數據傳給計算機。這部分的具體實現可參考文獻[1]。
2.2 小波壓縮技術
當雷達采樣率很高時,網絡傳輸前不進行壓縮處理,帶寬是不夠的。
基于幀的壓縮技術,不適合對雷達視頻具有實時要求的場合,因為會引入一個固定延時。而一維小波壓縮可以做到高效壓縮和實時要求的折衷。
小波壓縮的思想是將一維數字序列分為粗糙尺度和細節兩部分,各占一半存儲空間,這個過程可以一直遞歸下去;因為回波信號比較平滑,細節部分主要是噪聲,所以只保留粗糙尺度部分,如圖2所示。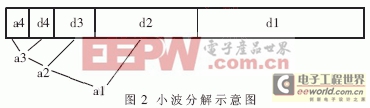
不同尺度系數的分解與合成如圖3所示。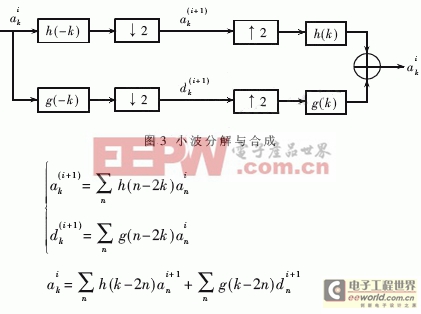
其中h(k)、g(k)是一組由兩尺度方程推導出的共軛鏡像濾波器。aki是第i層的(粗)尺度系數。第i層按遞歸分解成i+1層的更大尺度部分ak(i+1)和細節部分dk(i+1)。








評論