基于AT89S52的防撞小車系統設計

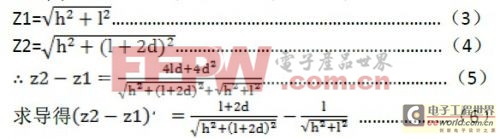
將公式6想減的兩項做除法不難發現第一項始終大于第二項,所以z2-z1是關于l的增函數, 同時隨著h的減小,z2-z1同樣會變大,也就是說當障礙物體靠近小車時,如果其偏離了小車的中心(即不會撞到)有一個明顯的特征為其z2-z1的值會比較大,我們可以取d=5cm h=30cm, 讓l在[10cm,30cm]間變化,做出的曲線如圖3所示,各個物理量的幾何關系見圖4 。
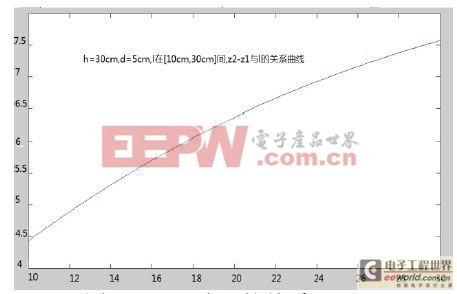
圖3 z2-z1與l的關系
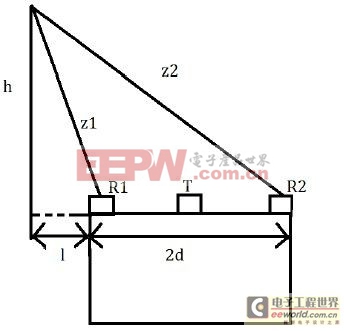
圖4 各個物理量的幾何關系
不難發現,當l距離在[10cm,30cm](h 30cm)區間時,z2-z1的差將 > 4cm.據此我們設定了一個閾值4cm,當檢測到差值大于4cm,不需要做任何剎車控制,直接直行通過,通過這樣簡單的計算判斷,我們可以有效避免由于偏離小車中心的障礙物靠小車過近造成的z1,z2的值過小,從而引來可能的剎車誤判。在做這個項目時,我們采用的車模體積不大,因此設計的閾值等不是很大,若應用到實際車模中時可根據情況改變閾值的大小。
3.2速度的計算
速度我們采取簡單的近似平均進行估算,我們可以計算出系統測距地間隔約為120ms,通過將當前的測距結果與上次測距結果做差比較,根據公式7可以估算出當前速度的近似值:

3.3系統流程(見圖5) 。
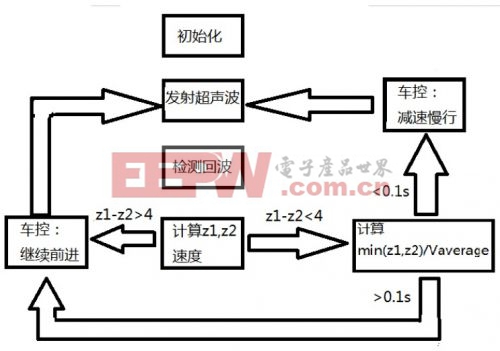
圖5系統流程


評論