ARC功率因數(shù)自動(dòng)補(bǔ)償控制儀的原理及其應(yīng)用

三、軟件的設(shè)計(jì)
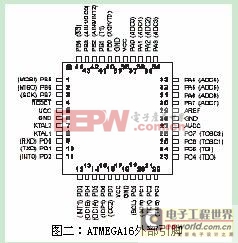
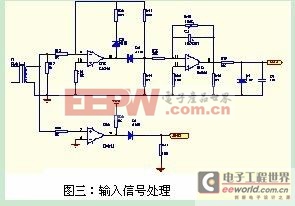
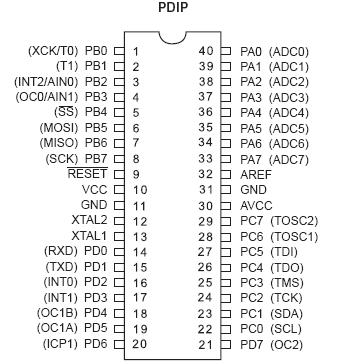
因整個(gè)系統(tǒng)對電壓、電流采樣的精度要求不高,我們直接用CPU的10位A/D對電壓、電流的信號進(jìn)行A/D轉(zhuǎn)換,轉(zhuǎn)換的結(jié)果一方面供顯示的需要,另一方面作為過壓與欠流的比較信號。我們將INT0設(shè)置為上升沿產(chǎn)生異步中斷,ICP設(shè)置為上升沿觸發(fā)輸入捕捉。當(dāng)INT0產(chǎn)生中斷時(shí),16位計(jì)數(shù)器開始以內(nèi)部恒定的頻率開始計(jì)數(shù),直到下一中斷的產(chǎn)生。在計(jì)數(shù)的同時(shí),當(dāng)TCP上有上升沿脈沖時(shí),即將16位計(jì)數(shù)器已計(jì)得的數(shù)據(jù)放入到捕捉寄存器中。當(dāng)一個(gè)采樣周期結(jié)束時(shí),計(jì)數(shù)器中得數(shù)據(jù)(N)即為外部交流信號的一個(gè)周期基數(shù), 捕捉寄存器中數(shù)據(jù)(n)電流Ia滯后電壓Ubc的基數(shù),將(n/N)*360o即為角度,根據(jù)上面的原理就可判斷在同一周波中時(shí)電壓超前電流還是電流超前電壓,同時(shí)還可得出超前或滯后的角度,將此數(shù)據(jù)進(jìn)行查表即可得到功率因數(shù)。
為了避免對電容器組中的某一組進(jìn)行頻繁的投切,平衡每一組電容器的工作時(shí)間,延長整個(gè)系統(tǒng)的使用壽命。我們對電容器的投切采用先投入的優(yōu)先切除,先切除的優(yōu)先投入的原則,我們在單片機(jī)的RAM中開辟了一空間,用于記錄每組電容器的投入與切除時(shí)間,然后進(jìn)行排序,將已工作時(shí)間最長的作為優(yōu)先切除對象,將切除時(shí)間最長的作為優(yōu)先投入對象。
當(dāng)三相交流的負(fù)載回路電流非常小時(shí),會產(chǎn)生投切振蕩的現(xiàn)象。也就是說控制系統(tǒng)投入一組電容器會產(chǎn)生過投,切除一組電容器又會產(chǎn)生投入不足,控制器就會產(chǎn)生重復(fù)的投切現(xiàn)象。為避免此想象的發(fā)生,我們設(shè)置了欠電流鎖定,當(dāng)電流值小于此數(shù)值時(shí),系統(tǒng)將停止對電容器的投切動(dòng)作,維持已投入的電容器工作。
在工作過程中,若采樣到的電壓數(shù)據(jù)大于設(shè)定的過壓保護(hù)值時(shí),控制器將逐步切除已投入的電容器,若發(fā)現(xiàn)超過設(shè)定的保護(hù)值的10%時(shí),則一次性切除所有已投入的電容器,保護(hù)電容器。
以上的技術(shù)現(xiàn)已應(yīng)用于本公司的ARC功率因數(shù)自動(dòng)補(bǔ)償控制儀中,經(jīng)測試運(yùn)行,系統(tǒng)工作穩(wěn)定、各項(xiàng)指標(biāo)達(dá)到了國家標(biāo)準(zhǔn)的要求,現(xiàn)已初步投放市場。









評論