基于80C51的開關磁阻電機遠程控制系統的研究

仿真的被控對象傳遞函數為

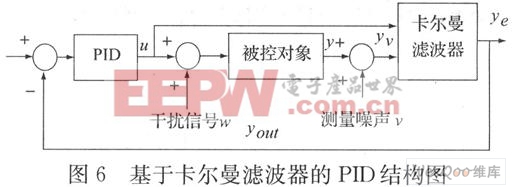
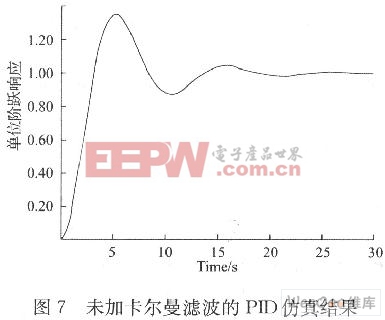
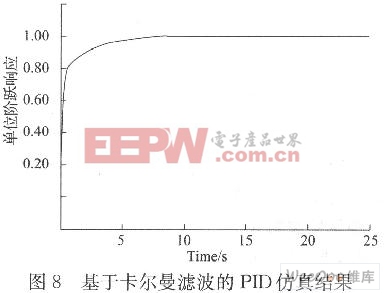
采用常規PID控制+卡爾曼濾波器控制,令過程噪聲ωk、νk協方差為1,幅度為0.02,輸入信號為階躍信號。在MATLAB中用隨機函數rand()來模擬白噪聲。沒有加卡爾曼濾波器的常規PID控制仿真結果如圖7所示,加入濾波器后PID控制階躍響應如圖8所示。
5 結束語
本文在開關磁阻電機調速系統中引入了CAN智能從站技術,并且將RS-485和CAN總線相結合,使開關磁阻電機擺脫舊的控制模式,為電機實現智能化、網絡化、遠程化控制提供一種新的思路。在開關磁阻電機調速系統中,將常規PID控制與卡爾曼濾波器相結合,仿真結果表明,基于卡爾曼濾波器的PID控制方法超調量小、控制效果好。
參考文獻:
[1].RS-485datasheethttp://www.dzsc.com/datasheet/RS-485_584821.html.
[2].RS-232datasheethttp://www.dzsc.com/datasheet/RS-232_584855.html.
[3].MAX491datasheethttp://www.dzsc.com/datasheet/MAX491_859509.html.
[4].89C51datasheethttp://www.dzsc.com/datasheet/89C51_105386.html.
[5].SJA1000datasheethttp://www.dzsc.com/datasheet/SJA1000_609075.html.
[6].6N137datasheethttp://www.dzsc.com/datasheet/6N137_91364.html.


評論