基于80C51的開關磁阻電機遠程控制系統的研究

由于應用環境的復雜,地域的廣闊等不利工作條件,給開關磁阻電機的調速控制與相關參數監控帶來了很多影響。因此,設計研制一種基于開關磁阻電機的遠程控制系統(SRD)具有十分重要的現實意義。
Controller Area Network(簡稱CAN),與一般的總線相比,CAN總線的數據通信具有突出的可靠性、實時性和靈活性。本文主要探討基于RS-485與CAN總線的開關磁阻電機遠程監控系統的構成。SRD調速系統通常采用傳統PID控制策略,系統很難保守良好性能。目前,神經網絡控制與模糊控制技術應用于SRD取得了一定的成績。
卡爾曼濾算法是一種遞推算法,對于系統存在過程及測量噪聲,狀態變量受到污染,可以利用卡爾曼濾波技術進行處理。本文將卡爾曼濾波器與傳統的PID控制相結合,使SRD控制效果得到明顯改善。
1 系統設計方案
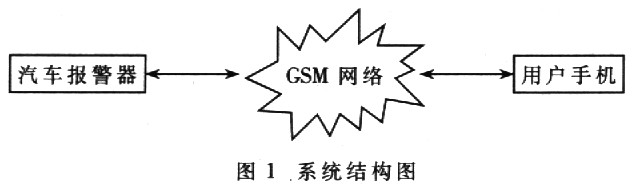
基于CAN總線的開關磁阻電機遠程控制系統如圖1所示。系統主要包括PC(上位機)、RS-485與CAN結合的通信網絡、CAN智能節點與開關組電機四大部分。串行接口標準的選擇上位機與CAN智能節點間的距離通常較遠,上位機的Rs-232C接口的最大傳輸距離為15m,不能滿足要求。而RS-485串行數據通信標準可傳送1200m以上,因此宜選用后者。上位機本身具有RS-232C接口,可配備一塊RS232-RS485轉換板STD5630,實現RS-232電平到RS-485電平的轉換。
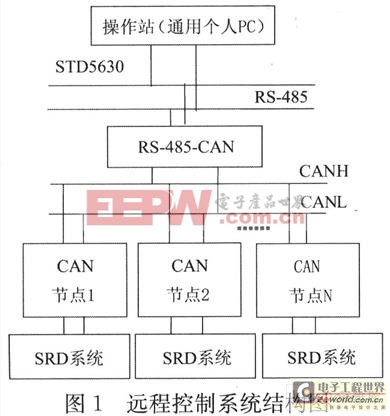
在該遠程監控系統中,采用RS-485與CAN結合通信網絡,節省了CAN適配卡與專門的驅動程序,因此可靠性與性價比得到了較大的提高。
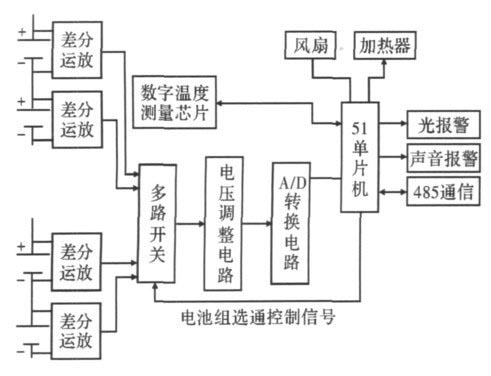
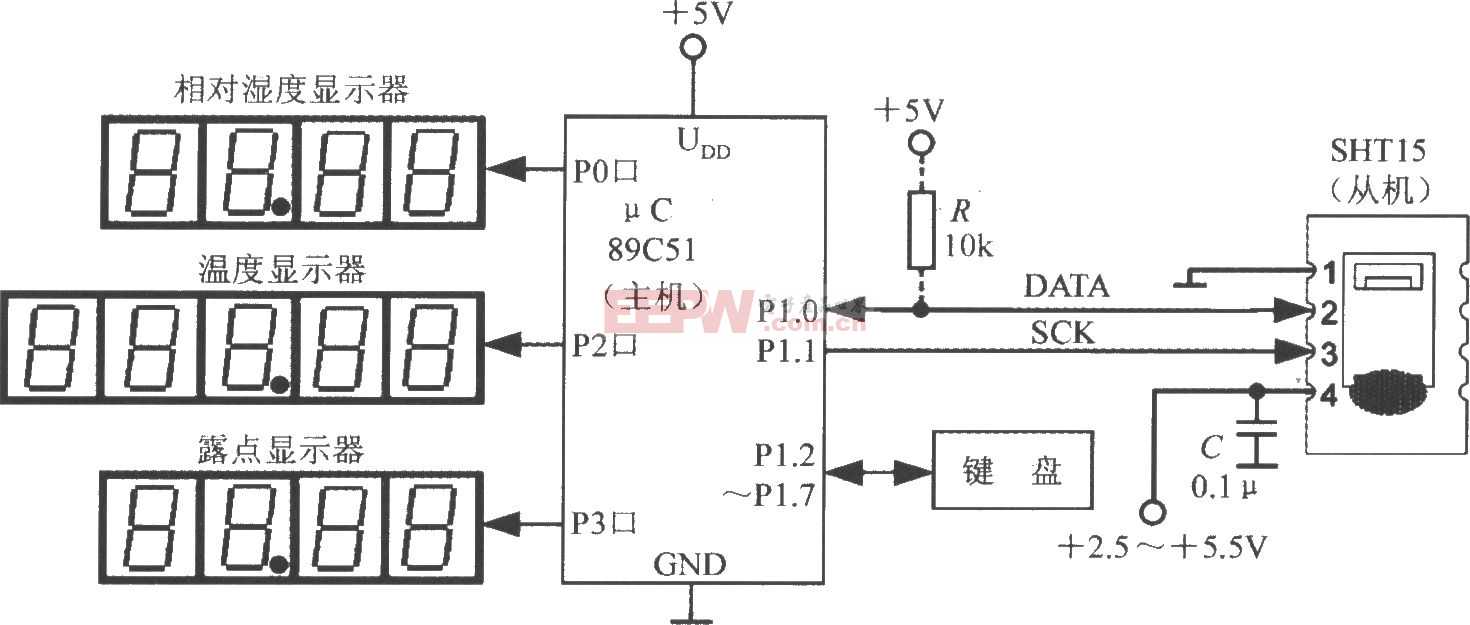
CAN總線智能節點在分布式控制系統中起著承上啟下的作用。它位于執行機構所在的現場,一方面和上位機進行通信,以完成數據交換;另一方面又可根據系統的需要對現場的執行機構進行控制和數據采集。典型的CAN總線控制節點是由微處理器、CAN控制器、CAN接口構成,如圖2所示。

2 硬件電路設計
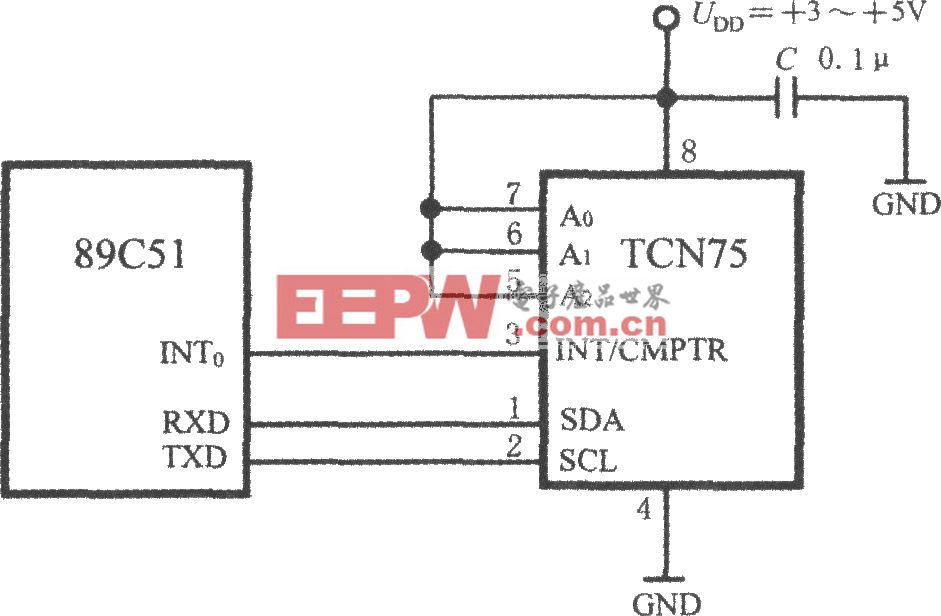
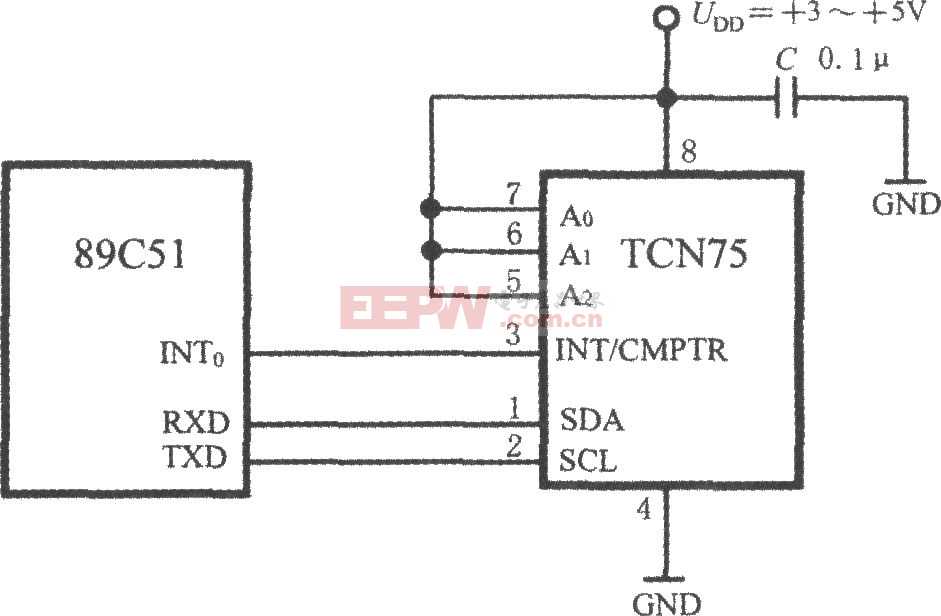
2.1 RS-485接口電路設計
RS-485接口電路見圖3所示。該電路主要由光耦和RS-485芯片組成,光耦能排除由于共地而可能串入的干擾。RS-485芯片采用MAX 491,其作用是實現RS-485串口傳輸的電氣標準。圖中MAX491的2個有效電平相反的引腳——接收、驅動器允許腳接在了一起,即使得RS-485工作在半雙工方式。


評論