一種尋跡小車中分布式控制系統的設計與應用

此尋跡小車模型采用7.5V電池驅動,通過改變PWM占空比調速。小車可以在不完全確定的道路環(huán)境下,通過自我判斷,對周圍環(huán)境進行探測,并做出相應的反應(如左拐彎、右拐彎和改變速度等)。目前用在機器人上的多為價格較貴的超聲波傳感器和紅外傳感器等,本設計采用價格便宜的反射式光耦傳感器來完成對周圍環(huán)境的感知。此外,小車還具有良好的導航系統。
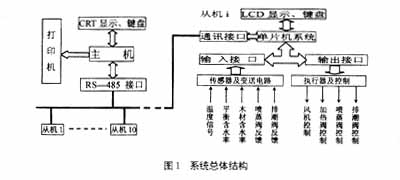
系統結構
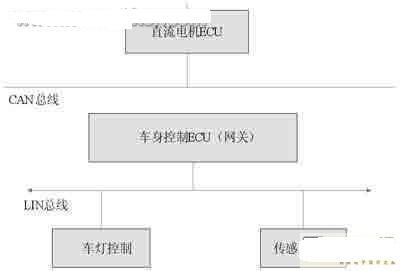
本系統采用分布式結構,如圖1所示。因為在車身控制系統中控制對象多而且分散,若采用點對點的集中控制方式,控制模塊與被控對象之間就需要大量連接電纜,會導致車內布線復雜且制造和安裝困難,并存在故障隱患。分布式系統結構可以根據控制對象的位置來設計控制模塊,從而縮短了控制對象與控制模塊之間的距離。各模塊間通過LIN總線來通信,該方式僅需要一根線作為通信線。此外,分布式系統結構還可降低單板的靜態(tài)電流,增加單板的穩(wěn)定性。

圖1 分布式車身控制系統結構圖
根據系統功能要求和結構特點,本控制系統被分成主控模塊和三個子模塊(傳感器模塊、電機控制模塊和燈控模塊)。其中主控模塊主要檢測車身主體部分控制開關的狀態(tài),并根據這些控制開關的狀態(tài)實現相應的控制策略,然后將控制命令通過CAN總線和LIN總線發(fā)送給相應的子模塊,之后根據各子模塊反饋的負載狀態(tài)判斷是否存在故障,若有故障則報警顯示。同時,CAN總線接收上層CAN網絡的某些信息。主控制模塊的微控制器采用了可靠性高、抗干擾能力強的汽車專用芯片XC164CS,其內部集成了CAN的控制器。圖2是主控制模塊的硬件原理圖。
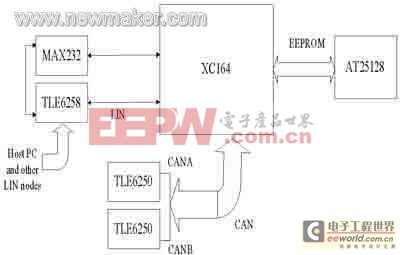
圖2 主控制器模塊硬件原理圖
電機控制模塊中的微控制器采用的也是XC164CS,這是由于該系列微控制器中都有相應的單元可以實現對電機的控制,相當方便。本設計使用了兩路電機控制小車的后輪驅動和前輪轉向。對直流電機的驅動和控制采用了電機控制接口芯片TLE6209,它的內部集成了一個H型橋式電路,用來驅動電機,實現電機的四象限運行,分別對應正轉、正轉制動、反轉和反轉制動。16位微控制器XC164CS通過內部的CAPCOM模塊產生一個10kHz的PWM信號給TLE6209,觸發(fā)H橋電路。
3 傳感器模塊的設計
傳感器模塊中采用了微控制器XC866,主要用來采集8個傳感器的值,傳送給主控制板的XC164CS進行處理,然后產生相應的策略改變PWM占空比對驅動和轉向電機做出相應的控制。同時,還要完成對通信模塊數據的發(fā)送和接收,其硬件框圖如圖3所示。
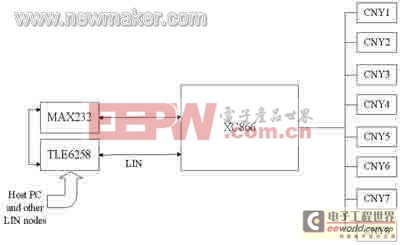
圖3 傳感器模塊硬件框圖

評論