基于CAN總線多軸運動控制器技術的研究

運動控制器通過can總線可以方便向各個伺服單元發(fā)送控制指令和位置指令,并實時的獲得各個伺服電機的狀態(tài)信息,按照需要實時地對伺服參數(shù)進行修改,各個伺服單元也可以通過can總線及時的進行數(shù)據(jù)交換。當節(jié)點嚴重錯誤時,具有自動關閉的功能以切斷該節(jié)點與總線的聯(lián)系,使總線上的其他節(jié)點及其通信不受影響,具有較強的抗干擾能力。由于運動控制器的位置指令直接輸入到各個伺服驅動器,因此每個伺服單元都獲得同步控制指令,使得任何一伺服驅動器不受其他伺服驅動器干擾影響。控制器采用arm+dsp可使產品通用性強,可以被廣泛的應用于數(shù)控產品中,具有較強的硬實時性;快速響應性;由于采用can總線控制,使系統(tǒng)在應用中可根據(jù)實際情況擴展多個伺服驅動控制器,具有靈活性;體積小;造價低等優(yōu)點。
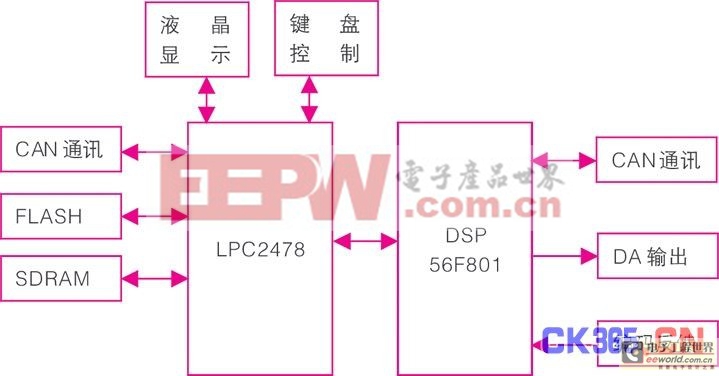
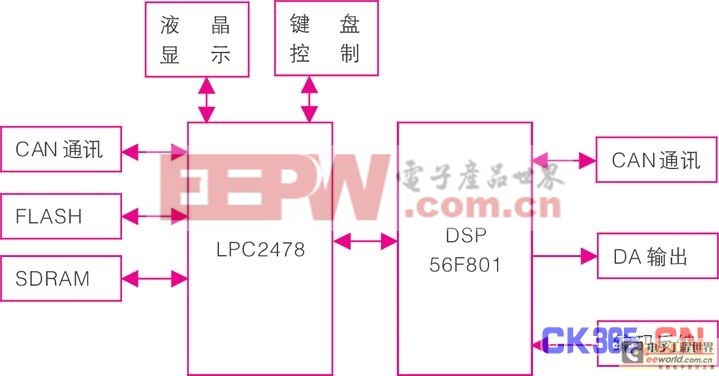
圖1 系統(tǒng)結構框圖
4 結束語
本文提出的基于can總線多軸運動控制器的設計思路,具有以下優(yōu)點:
(1)多軸運動控制器采用arm+ dsp,使系統(tǒng)具有穩(wěn)定性、快速響應性、高精度性、通用性的特點。
(2) 基于arm平臺,可以很好的嵌入uc/0sii實時操作系統(tǒng),增強本系統(tǒng)的硬實時性和靈活性。
(3) 基于can總線控制,控制策略方便靈活,具有很高的可靠性,簡化方案節(jié)約成本。

伺服電機相關文章:伺服電機工作原理








評論