公路動態重系統紅外測速光電傳感器的研制

關鍵詞:紅外信號,傳感器,速度測量
1 引言
公路動態稱重系統是在不影響汽車行駛速度的條件下,稱量出運輸汽車的凈重。該系統可廣泛應用于高速公路、橋梁等交通要道對來往運輸車輛的載重進行控制。本文僅是其紅外光電測速傳感器部分進行闡述。
2 紅外光電測速傳感器的工作原理
該傳感器工作原理如圖1所示。該傳感器有兩對完全相同的紅外發射裝置、紅外接收與處理裝置。紅外接收與處理裝置。紅外發射裝置以一定頻率f發射紅外光。紅外接收與處理裝置將該頻率的紅外光轉換成電信號并進行處理,輸出信號經邏輯電路后轉換為高或低電平Y,來控制計數器的啟閉。
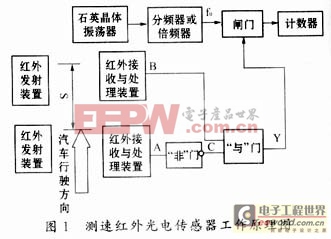
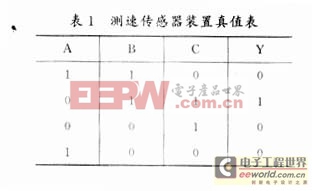
該傳感器裝置需實現的邏輯功能是:當沒有汽車遮斷該傳感器發射的紅外光時,兩對紅外接收與處理裝置將接收到的頻率為f的紅外光進行處理,輸出A、B高電平,Y為低電平,計數器不能打開;當汽車遮斷第一對紅外發射裝置發出的紅外光后,計數器開始計數;當汽車繼續行駛,切斷第二束紅外光后,計數器停止計數。計數器的計數值是汽車通過該傳感器兩探頭的時間。即該傳感器測速裝置的真值表如表1所示。
邏輯表達式為
Y=AB=BC
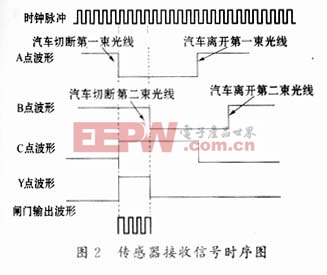
為使計數器計數準確,防止汽車在經過傳感器兩紅外探頭之間時出現誤計數動作,汽車車長應大于兩紅外探頭間距離S。波形圖如圖2所示。兩紅外探頭間距離S一定,設汽車行駛速度為V(m/s),計數器計數值為N,單片機主振頻率為f0(Hz),則汽車行駛速度為
由上式可知,根據傳感器兩探頭間距S、單片機主振頻率f0和計數器計數值N即可計算出汽車行駛速度V。
該紅外光電傳感器只需提供計數器啟閉的控制信號,不進行數值計算。
3 硬件
3.1 發射部分
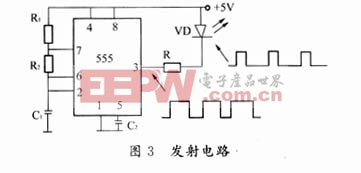
由于紅外光波不可見、對人體無危害,不會給司機帶來心理上的壓力,因此該傳感器的光源部分采用紅外線。為降低太陽光、車燈光線等干擾源的影響,提高傳感器的抗干擾能力,紅外發光二極管采用脈沖直流驅動,如圖3所示。用555定時器構成多諧振蕩器,提供頻率和占空比一定的矩形波,驅動紅外二極管VD發出同頻率的脈沖調制紅外光。R為二極管限流電阻。電路簡單可靠。
3.2 接收與處理部分
接收部分采用專用紅外接收集成電路,其工作中心頻率與發射部分紅外光頻率相同。紅外光電二極管接收調制紅外光,進行光-電轉換后,經專用紅外接收集成電路處理得到高電平。信號處理電路將該電平進一步進行處理,以控制計數器正確計出汽車通過兩紅外探頭的時間。該傳感器接收部分對紅外信號反應非常靈敏,必須良好屏蔽,防止紅外反射光及其他紅外信號的干擾,提高接收電路的抗干擾能力,防止誤動作。
4 結束語
近年來,隨著我國經濟、科技以及交通運輸業的迅速發展,公路運輸動態稱重已成為一種趨勢,已引起有關部門的高度重視。測速傳感器作為該系統的重要組成部分,也必將獲得廣泛的應用。












評論