開放式控制平臺及其在無人潛航器制導系統中的

無人潛航器UUV是一種主要以潛艇或水面艦艇為支援平臺、能長時間在水下自主遠程航行的智能化裝置,可以攜帶多種專用設備或武器,執行特定的任務和使命。20世紀90年代,世界各主要海軍國家開始關注UUV在軍事領域的應用前景,并相繼開發出了一批多用途的無人潛航器。與傳統潛艇相比,無人潛航器具有使用靈活、隱蔽性強、適應復雜海況以及可有效減少人員傷亡的特點。因此,美國海軍于1999年提出了一套完整的無人潛航器發展計劃,開始大力發展軍用UUV系統,并希望其能夠達到與無人飛機相類似的多用途性和通用性。2005年1月,美國海軍發布了新的《無人潛航器(UUV)總體規劃》,該規劃將無人潛航器提高到與無人機、無人戰車和機器士兵研究同等重要的位置。
機動控制和制導技術是UUV的關鍵技術之一,自動化程度的高低直接決定UUV的整體性能。要求水下自主遠距離航行時,在無人控制下,能自動收集并傳送信息,探測、評估并主動規避威脅目標和障礙物;在出現不可預知情況及惡劣水文條件時,可根據任務目標、周圍環境情況和剩余動力,迅速做出反應,自主決策,返回母艦或與其他平臺合作,組成UUV編隊,協同完成任務。
本文主要研究了OCP和SEC的基本結構、嵌入式中間件結構,結合OCP、嵌入式操作系統、實時網絡等計算機技術和控制技術來分析UUV的制導系統,提出未來新型UUV制導系統一般性結構和設計的方法,實現控制算法和軟硬件平臺相結合的結構體系。該體系將會為開發新一代的UUV提供一個高技術的平臺,并降低UUV開發的難度和費用。
1 OCP的基本結構和中間件技術
目前的自主航行器系統受到計算機技術、控制理論、網絡通信技術和嵌入式系統的影響已經得到空前的發展和突破。其最顯著的特點是系統越來越復雜,戰術指標越來越高。任務的復雜性、環境的不確定性、系統內多硬件和多軟件平臺是目前UUV的最主要特征。這給UUV的開發帶來非常大的困難,不但要求開發者有專業領域的知識,還要具備計算機操作系統和硬件的知識。如果計算機工程師向用戶提供的平臺包括硬件和嵌入式操作系統,并利用中間件技術隔離應用程序和操作系統,這樣,UUV工程師就可以集中精力開發自己擅長的專業領域控制軟件。
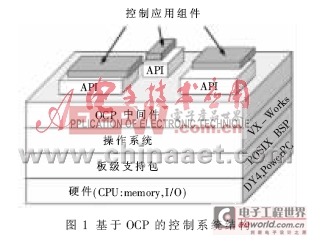
基于嵌入式系統的OCP技術在結構上與傳統集中控制系統大致相同,其在操作系統之上設計有一層中間件,如圖1所示。它將應用程序接口API(Application Programming Interface)與操作系統隔離,使得這種平臺具備真正的開放式結構和可重新配置能力,并且適合多類型的硬件和軟件平臺。同時OCP的各控制單元在物理位置上可與測量變送單元和操作執行單元合為一體,可以在現場構成完整的基本控制系統。
對于開放式控制平臺的無人潛航器制導系統,采用OCP的主要目的是將中間件技術引入到航行器處理系統中,包括UUV的航行管理、自動駕駛控制、系統存儲器管理和武器發射控制等。
采用OCP中間件還包括:
(1) 運行時間結構和中間件。OCP使用中間件將各類不同的嵌入式系統綜合在一起,控制各類軟件的執行和通信。中間件的另一個重要任務是隔離應用程序和操作系統,使得用戶開發應用程序時,與操作系統平臺和硬件平臺無關。
(2) 仿真環境。仿真環境則允許嵌入式系統在一個虛擬的環境中實現,例如讀取航行器的各傳感器信號,給執行機構發布執行指令等。
(3) 工具綜合。工具綜合提供給航行器開發者使用包括Matlab/Simulink等軟件的接口,允許開發者更有效地使用 這些工具開發航行器的嵌入式軟件,如快速控制原型(RCP)、硬件在回路仿真等設計手段。
目前OCP的中間件技術有多種選擇,較多采用的是國際OMG(Object Management Group)組織推出的分布式對象計算標準CORBA(Common Object Request Broker Architecture)。但由于通用CORBA規范并不是針對分布式實時應用而制定的,因而缺乏對可預測性、包括時間的確定性、低延遲、QoS等應有的實時特性的支持。所以,需要將CORBA技術本身進行改進和擴展,以滿足分布式實時應用的需要。本質上講,實時CORBA系統是一個面向對象的分布式實時中間件,能夠支持具有不同特性的分布式實時應用系統,具有較高的性能和有效控制系統資源的能力。
平臺無關性、語言無關性和網絡協議無關性是CORBA具有的三個重要特性,它的基礎核心是ORB。正是利用了CORBA基于事件通信的技術實現了OCP內部的分布式處理和內部組件之間的通信,滿足了UUV復雜系統的許多要求,例如:實時路徑規劃、混合系統的自主管理、結構的可重新動態配置以及對UUV傳感器和執行器的實時觸發等。
2 開放式無人潛航器制導系統控制平臺
2.1 新型UUV制導系統結構及其特點
UUV制導系統的復雜性主要表現在目標和UUV本體運動信息的獲取、自導律和控制律的產生、作戰有效性和對抗決策等。UUV系統具有多CPU硬件平臺和多操作系統軟件平臺,各平臺的通信也具有多樣性,即UUV是一種典型的異構網絡平臺。在參考文獻[4]、[5]中提出了基于現場總線和嵌入式系統的UUV制導系統結構,可以實現制導大回路一體化,但系統開發復雜,對工程師的專家知識要求很高,不利于嵌入式技術在UUV中的應用。本文在參考文獻[6]的基礎上提出基于SEC和OCP技術設計新型開放式UUV制導系統,正是為了解決嵌入式技術在UUV中的應用瓶頸。首先涉及到的技術就是異構平臺信息的統一管理和信息融合,以便能全息地利用各類信號,支撐制導全系統的有效和可靠地運行。
在UUV的設計中,微處理器、微控制器、數字信號處理器等得到普遍應用,并構成多種運算處理平臺。有些使用傳統的DOS操作系統,有些甚至不使用操作系統。這不但帶來了諸如布線、屏蔽、抗干擾、隔離地等眾多問題,而且無論從重量、電磁干擾、可靠性等方面都非常不利于UUV總體性能的提高,不利于UUV武器系統的研發和生產。
因此,本文提出的采用現場總線、嵌入式操作系統和OCP技術,構造UUV制導系統,是因為這種新型結構具有的結構可重新配置和軟件的可重用性,可以從根本上解決以上難題。
2.2 基于OCP技術的UUV制導系統
在現代UUV的設計中,大多以控制系統為中心,完成信號的綜合、判斷,協調其他各系統的動作流程。這為現場總線、嵌入式操作系統和OCP技術的采用提供了很大的便利條件,其中基于現場總線和實時多任務嵌入式操作系統的控制節點結構、網絡控制系統分析在參考文獻[4-6]已經進行過研究,本文將從OCP技術的角度給出控制節點結構特點和性能。
圖1表示了基于OCP的控制節點的典型結構。與參考文獻[6]中圖2結構的不同之處在于:在VxWorks操作系統和應用程序之間增加了OCP中間件層,并要求用戶開發的應用程序也要按照面向對象技術和層次的概念來開發,使得應用程序與操作系統分離。其次該結構可以滿足基于OCP技術的要求,包括實時性、高可靠性、系統的靈活性和系統的可重新配置等。在OCP中間件層中,要求系統開發商能夠向用戶提供與操作系統無關的標準應用程序接口(API)。API接口包括底層I/O驅動、操作系統的管理等。標準API接口可以保證應用程序與操作系統


評論