開放式控制平臺及其在無人潛航器制導系統中的

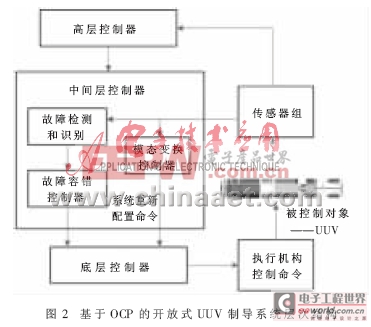
以UUV姿態控制為例,基于OCP的控制系統的典型結構是分層控制結構。如圖2所示,可以非常明顯地看出,根據UUV主控節點的功能,將控制劃分為三個層次:
(1) 系統底層控制主要完成控制系統最基本的功能,如系統的穩定性、調節時間控制等,這層是所有系統最基本的,該層也負責與節點的操作系統打交道。由于CORBA的ORB是一種軟總線技術,負責提供對象間信息流通所需的通路,不同硬件平臺在傳遞參數時均使用自己的格式,一旦進入ORB,CORBA均將其轉換為一種通用的格式。因此在采用了ORB技術后,該節點的許多子程序可以被網絡上其他節點調用,即使調用節點使用的軟硬件平臺不一致也沒有關系。
(2) 中間層的控制作用主要是完成系統的離散事件處理,如模態的變換、故障的處理等。模態是指航行器從一種航行狀態到另一種航行狀態的變換。故障處理包括系統故障的識別、故障檢測、故障隔離以及為了處理系統故障而采用的系統控制的重新配置。另外,該層還要負責處理來自傳感器的信號,包括信號的濾波、信號的識別等。尤其是當出現傳感器故障時,該層還負責信息融合、傳感器故障的識別、隔離和信號的重構。
(3)高層控制器是UUV制導系統主控節點的中樞,功能包括系統的程序彈道設置以及為完成系統任務而需要的航程規劃等。
主控制器節點控制算法的分層是為了適應基于嵌入式系統的OCP結構,它能完全滿足圖1所示的軟件結構。圖2的中間層和高層控制可以按所選用的ORB規范設計成通用組件模塊,可供本節點使用,也可供其他節點調用。
2.3 中間件技術和異構網絡及其在UUV制導系統中的作用
基于CORBA的OCP技術在UUV制導系統中的主要作用可以歸結為兩點:軟總線技術和中間件技術。
基于OCP的嵌入式UUV制導系統軟件框架的核心,是在現場總線和實時多任務操作系統基礎上的分布式控制平臺上的應用程序采用了實時CORBA技術,而ORB又是CORBA的核心。如前所述,ORB的作用實質上是一條軟總線,所有的組件都掛接在該總線上。只要遵照規定的總線通信協議,ORB允許在不同平臺下的最底層的組件能夠相互通信。在TTCAN實時總線[6]的支持下,實時CORBA的中間件技術支持分布式處理和內部組件之間的實時通信,圖3表示了基于ORB軟總線的UUV姿態控制的結構圖(其中姿態控制器組件的結構如圖2所示)。

在圖3中的軟總線上有5個節點組件,系統的陀螺儀和慣性組件所敏感的信號都可以作為UUV姿態的控制信號,但陀螺儀和慣性組件所敏感的信號具有不同的精度和時間標尺。利用中間件的軟總線技術系統的可重新配置功能,姿態控制器可以很容易地根據兩組敏感元件的輸出和系統的需求進行敏感元件的切換,而不必根據全系統的性能來決定這兩個敏感元件的切換。因此,系統中的事件通道可以根據局部的需要來極小化組件的切換。
在計算機軟硬件系統中,層次是一個非常重要的概念和技術,幾乎所有的操作系統和應用軟件都是按層次結構設計的。由于OCP的作用是隔離操作系統和應用組件,因此,采用這種中間件技術可以更有效地做系統開發,可以使工程師在開發應用系統時不必要有過多的操作系統知識,而可集中精力在自己的應用程序上。其次,由于采用中間件技術,OCP具有與系統無關性,這樣在進行系統原理設計時,底層的平臺就能夠使用比較熟悉的軟件系統,如Windows等,而不必要一開始就使用類似的VxWorks,以便能夠更有效和更快地做出方案設計。
3 基于OCP技術的UUV制導系統的特點
OCP是美國DARPA的SEC規范中的一個重要部分。DARPA提出SEC的主要目的就是為了解決復雜的UAV控制問題,目前國外有關SEC和OCP的研究報告也主要集中在無人自主航行器上,包括空中航行器、地面航行器和無人旋翼飛機。出于保密的原因,尚未看到在UUV武器中的研究報告。但由以上研究可以看出,基于SEC和OCP技術的UUV制導系統有許多特點:
(1) SEC和OCP,包括CORBA都是一種規范,國外包括波音公司在內的許多大公司都在圍繞這些規范開發自己的應用系統,開發自己的適合UUV的軟硬件規范和實時總線協議規范,對于指導UUV規范的發展非常有利。
(2) 采用中間件技術可以有效地解決目前UUV內部的多CPU型號和多操作系統帶來的問題,由此不但可以降低系統的開發成本和縮短研制時間,還可以提高系統的可靠性、可維護性和可擴展性。
(3) OCP使用中間件技術與操作系統無關性,可以最大限度地解決目前嵌入式系統開發的難度。在最底層的硬件和操作系統的基礎上,UUV工程師可以按照規范來設計應用程序。這樣可以制定項目開發規范和規章,更好地解決目前UUV武器系統開發中各自為戰的局面,對提高系統的質量有很大的好處。
(4) SEC和OCP在UUV中的應用必須建立在實時多任務嵌入式和實時總線的基礎上,才能夠充分發揮OCP的功能。
(5) 目前國內的SEC和OCP技術,與實際應用還存在一些距離,尤其是工程化的問題、組件的數字化問題、相應的新的控制技術和制導技術的變化等問題。在國內,這些新技術在UUV研制中的應用雖然還是空白,但它具有廣闊的前景。
本文研究了當前復雜系統控制的主流技術,即基于SEC的開放式控制平臺,并著重探討了OCP技術及其在UUV制導系統中的應用及關鍵技術。UUV制導系統本身具有信息復雜性、不完整性和多目標決策等特點,決定了其導引和控制的難度。由于現場總線、網絡控制理論的應用和目前UUV武器的開發各自為戰的現狀,使得UUV武器系統具有多硬件平臺和多軟件平臺,已經構成一個典型的異構性網絡。對這類復雜的異構網絡系統如果沒有一個規范和統一的通信協議,必將使得系統控制具有很高的技術難度,也會阻礙進一步的發展。而美國DARPA倡導的SEC技術是實現這一要求的有效技術之一,目前包括美國波音公司等在內的公司正在將此技術大量應用在UUV的控制系統中。
開放式控制平臺不是一個孤立的技術,它涉及嵌入式操作系統、實時現場總線、快速控制原型、硬件在回路仿真、網絡控制系統等多個方面,而這些都是目前計算機和控制中的最新技術和理論。在UUV制導系統中引入SEC和OCP這些新的理論和技術,為UUV制導系統中許多目前存在的問題提供解決問題的新途徑。
參考文獻
[1]KEVICZKY T, BALAS G J. Flight test of a receding horizon controller for autonomous UAV guidance.2005.in:American Control Conference, Portland, OR, USA,2005:8-10.
[2] BONNIE S. Software enabled control: background andmotivation. Proceedings of the American Control Conference, Arlington, VA June 2001:25-27.
[3]PAUNICKA J, MENDEL B, CORMAN D. The OCP-an open middleware solution for embedded systems, Proceedings of the American Control Conference, Arlington, VAJune 2001:25-27.
[4]吳旭光.現場總線技術及其在魚雷中的應用.魚雷技術,2002(1):12-15.
[5]王慧,吳旭光.基于嵌入式技術的魚雷制導系統結構研究.魚雷技術,2004(2):25-28.
[6]吳旭光,路亞娟,唐苗.基于網絡控制系統的魚雷制導系統結構. 魚雷技術,2005(1):18-21


評論