步進電機全閉環控制技巧

摘要
步進電機由于體積精巧、價格低廉、運行穩定,在低端行業應用廣泛,步進電機運動控制實現全閉環,是工控行業的一大難題。
引言
主要問題有兩個,原點的不確定性和失步,目前,采用高速光電開關作為步進系統的原點,這個誤差在毫米級,所以在精確控制領域,是不能接受的。另外,為了提高運行精度,步進電機系統的驅動采用多細分,有的大于16,假如用在往復運動過程中,誤差大的驚人。已經不能適應加工領域。
為此,提出步進電機全閉環控制系統,以適應目前運動控制領域的需求。
1、 硬件連接
硬件連接加裝編碼器,根據細分要求,采用不同等級的解析度編碼器進行實時反饋。
2、 原點控制
根據編碼器的Z信號,識別、計算坐標原點,同數控系統相同,精度可以達到2/編碼器解析度×4。
3、 失步控制
根據編碼器的反饋數據,實時調整輸出脈沖,根據失步調整程度,采取相應辦法。
下圖是電路原理
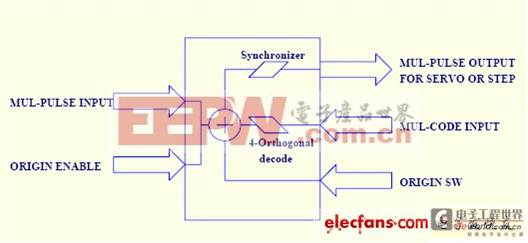
4、 電路原理描述
電路采用超大規模電路FPGA,輸入、輸出可以達到兆級的相應頻率,電源3.3V,利用2596開關電源,將24V轉為3.3V,方便實用。
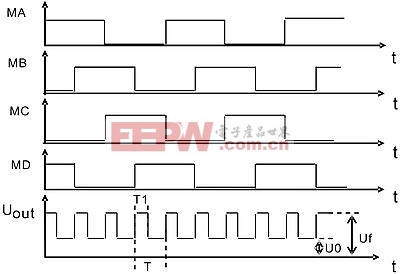
輸入脈沖與反饋脈沖進行4倍頻正交解碼后計算,及時修正輸出脈沖量和頻率。
5、 應用描述
本電路有兩種模式,返回原點模式和運行模式。當原點使能開關置位時,進入原點模式,反之,進入運行模式。
在原點模式,以同步于輸入脈沖的頻率輸出脈沖,當碰到原點開關后,降低輸出脈沖頻率,根據編碼器的Z信號,識別、計算坐標原點。返回原點完成后,輸出信號。此信號及其數據在不斷電的情況下,永遠保持。
在運行模式,以同步于輸入脈沖的頻率輸出脈沖,同時計算反饋數據,假如出現誤差,及時修正。另外,大慣量運行時,加減速設置不合理的情況下,可能會及時反向修正。
6、 技術指標
(1)輸入輸出相應頻率:≤1M;
(2)脈沖同步時間誤差:≤10ms;(主要延誤在反向修正,不考慮反向修正,≤10us)
(3)重定位電氣精度: ≥2/編碼器解析度×4/馬達解析度×細分)
(4)重定位原點電氣精度≥2/編碼器解析度×4/馬達解析度×細分)
(5)適應PNP,NPN接口
(6)適應伺服脈沖控制
(7)適應各種編碼其接口
步進電機運動控制一旦解決上述問題,增加數百元成本的情況下可以實現全閉環控制,毫不遜色于伺服系統。特別是其價格低廉、控制簡單、壽命長久的特點在某些場合,可能優于伺服系統。
光電開關相關文章:光電開關原理 脈沖點火器相關文章:脈沖點火器原理








評論