步進電機原理與問答

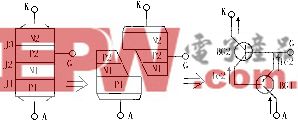
為盡量提高電機的動態(tài)性能,將信號分配、功率放大組成步進電機的驅(qū)動電源。我廠生產(chǎn)的SH系列二相恒流斬波驅(qū)動電源與單片機及電機接線圖如下:
說明:
CP 接CPU脈沖信號(負(fù)信號,低電平有效)
OPTO 接CPU+5V
FREE 脫機,與CPU地線相接,驅(qū)動電源不工作
DIR 方向控制,與CPU地線相接,電機反轉(zhuǎn)
VCC 直流電源正端
GND 直流電源負(fù)端
A 接電機引出線紅線
接電機引出線綠線
B 接電機引出線黃線
接電機引出線藍(lán)線步進電機一經(jīng)定型,其性能取決于電機的驅(qū)動電源。步進電機轉(zhuǎn)速越高,力距越大則要求電機的電流越大,驅(qū)動電源的電壓越高。電壓對力矩影響如下:
4、細(xì)分驅(qū)動器
在步進電機步距角不能滿足使用的條件下,可采用細(xì)分驅(qū)動器來驅(qū)動步進電機,細(xì)分驅(qū)動器的原理是通過改變相鄰(A,B)電流的大小,以改變合成磁場的夾角來控制步進電機運轉(zhuǎn)的。
四、步進電機的應(yīng)用
(一)步進電機的選擇
步進電機有步距角(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成。一旦三大要素確定,步進電機的型號便確定下來了。
1、步距角的選擇
電機的步距角取決于負(fù)載精度的要求,將負(fù)載的最小分辨率(當(dāng)量)換算到電機軸上,每個當(dāng)量電機應(yīng)走多少角度(包括減速)。電機的步距角應(yīng)等于或小于此角度。目前市場上步進電機的步距角一般有0.36度/0.72度(五相電機)、0.9度/1.8度(二、四相電機)、1.5度/3度(三相電機)等。
2、靜力矩的選擇
步進電機的動態(tài)力矩一下子很難確定,我們往往先確定電機的靜力矩。靜力矩選擇的依據(jù)是電機工作的負(fù)載,而負(fù)載可分為慣性負(fù)載和摩擦負(fù)載二種。單一的慣性負(fù)載和單一的摩擦負(fù)載是不存在的。直接起動時(一般由低速)時二種負(fù)載均要考慮,加速起動時主要考慮慣性負(fù)載,恒速運行進只要考慮摩擦負(fù)載。一般情況下,靜力矩應(yīng)為摩擦負(fù)載的2-3倍內(nèi)好,靜力矩一旦選定,電機的機座及長度便能確定下來(幾何尺寸)
3、電流的選擇
靜力矩一樣的電機,由于電流參數(shù)不同,其運行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機的電流(參考驅(qū)動電源、及驅(qū)動電壓)
4、力矩與功率換算
步進電機一般在較大范圍內(nèi)調(diào)速使用、其功率是變化的,一般只用力矩來衡量,力矩與功率換算如下:
P= Ω·M Ω=2π·n/60 P=2πnM/60
其P為功率單位為瓦,Ω為每秒角速度,單位為弧度,n為每分鐘轉(zhuǎn)速,M為力矩單位為牛頓·米
P=2πfM/400(半步工作)
其中f為每秒脈沖數(shù)(簡稱PPS)
(二)、應(yīng)用中的注意點
1、步進電機應(yīng)用于低速場合---每分鐘轉(zhuǎn)速不超過1000轉(zhuǎn),(0.9度時6666PPS),最好在1000-3000PPS(0.9度)間使用,可通過減速裝置使其在此間工作,此時電機工作效率高,噪音低。
2、步進電機最好不使用整步狀態(tài),整步狀態(tài)時振動大。
3、由于歷史原因,只有標(biāo)稱為12V電壓的電機使用12V外,其他電機的電壓值不是驅(qū)動電壓伏值,可根據(jù)驅(qū)動器選擇驅(qū)動電壓(建議:57BYG采用直流24V-36V,86BYG采用直流50V,110BYG采用高于直流80V),當(dāng)然12伏的電壓除12V恒壓驅(qū)動外也可以采用其他驅(qū)動電源,不過要考慮溫升。
4、轉(zhuǎn)動慣量大的負(fù)載應(yīng)選擇大機座號電機。
5、電機在較高速或大慣量負(fù)載時,一般不在工作速度起動,而采用逐漸升頻提速,一電機不失步,二可以減少噪音同時可以提高停止的定位精度。
6、高精度時,應(yīng)通過機械減速、提高電機速度,或采用高細(xì)分?jǐn)?shù)的驅(qū)動器來解決,也可以采用5相電機,不過其整個系統(tǒng)的價格較貴,生產(chǎn)廠家少,其被淘汰的說法是外行話。
7、電機不應(yīng)在振動區(qū)內(nèi)工作,如若必須可通過改變電壓、電流或加一些阻尼的解決。
8、
脈沖點火器相關(guān)文章:脈沖點火器原理








評論