動態偏振控制器驅動電路分析

引 言
偏振控制器是一種重要的光器件,在光纖通信和傳感領域都有著廣泛的應用。實際運用中,偏振控制器的半波電壓與廠家給出的標稱值并不完全一致,導致了使用的不便。因此在使用時需要有與之配套的驅動電路。但是,許多廠家并不提供配套的驅動電路,即使提供,價格也昂貴,在實際工程開發中不能達到最佳性價比。因此,自主研制DPC的驅動電路是很有必要的。
本文以光纖擠壓型偏振控制器為研究對象,運用邦加球圖示法分析了其工作原理,并介紹基于DDS技術和FPGA的動態偏振控制器驅動電路的工作原理、系統結構及軟、硬件設計。測試結果表明,設計實現了驅動電路的預定功能,生成了4路頻率幅值均可調的正弦驅動信號。
1 DPC的工作原理
這里研究的光纖擠壓型偏振控制器,其內部結構如圖1所示。它由4個壓電陶瓷光纖擠壓器(稱為擠壓器F1,F2,F3,F4)組成,其方位角分別為0°,45°,O°,45°,各擠壓器對應的驅動電壓為V1,V2,V3,V4。分別在4個擠壓器上加電壓信號驅動,產生相應的壓力擠壓光纖,形成線性雙折射,改變入射光波的相位差,從而實現任意偏振態轉換。
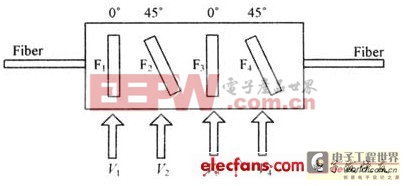
由文獻[3—5]和上述偏振控制器內部結構,可將擠壓器中的四段光纖(分別稱為d1,d2,d3,d4)看成不同方位角的相位延遲器。
(1)d1,d3可看成方位角為零的相位延遲器,只改變輸入光的相位延遲而不改變其偏振方向,在邦加球上表現為輸入偏振態繞S1軸的旋轉。
(2)d2,d4可看成方位角為45°的相位延遲器,也即旋光器和相位角為零的相位延遲器的合成,不僅改變輸入光的相位延遲,也改變其偏振方向,其偏振態變換在邦加球上表現為繞S2的旋轉。
圖2為d1,d2,d3,d4對偏振態變換在邦加球上的顯示。如圖2所示,在邦加球上,隨所加電壓的變化,d1或d3的輸出光起始偏振態S繞S1軸順時針旋轉。d2,d4的輸出光偏振態S'隨所加電壓變化在邦加球上繞S2軸逆時針旋轉。
圖2光纖擠壓器偏振態隨電壓變化的邦加球示意圖由此可知,只要輸入光的偏振態與F1和F2的方向都不垂直,則輸入光的偏振態都可以通過操作至少2個擠壓器改變到任意一個偏振態。
2 DPC的驅動電路設計
DPC驅動電路的設計基于DDS技術,系統主要由Xilinx Spartan-3系列FPGA、數/模轉換器LTC1668及寬帶放大器LT1812組成。
2.1 DDS的基本原理
DDS的基本原理是基于采樣定理。將相位累加器輸出的相位碼通過查表法映射成波形幅度碼,經模/數轉換和低通濾波后產生波形,其框圖如圖3所示。它主要由參考時鐘fref、相位累加器、相位寄存器、波形存儲器、數模轉換器及低通濾波器等部分構成。
DDS工作時,它將在時鐘脈沖的控制下,對頻率控制字F用累加器進行處理,以得到相應的相位碼;然后由相位碼尋址波形存儲器進行相位碼——幅度編碼變換后輸出不同的幅度編碼;再經過數模轉換器和低通濾波器處理,即可得到由頻率控制字決定的連續變化的輸出波形。
2.2 硬件組成
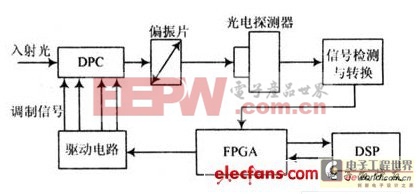
DPC的驅動電路是基于偏振度測試系統平臺(見圖4)研制的。DPC用于將輸入光擾偏后輸出,再經檢偏器和探測器將光強信息轉化為數字量送入FPGA,FPGA對數據進行處理后再對DPC的驅動電壓做出調整并輸出,以達到完全擾偏的目的。
要實現完全擾偏,也即是讓輸入偏振態在一定時間內遍歷各個偏振態。根據DPC的工作原理及實驗嘗試,測試系統使用4路正弦信號同時驅動4個光纖擠壓器。根據DPC自身性質,所需提供電壓最大值應小于2 V,正弦波頻率應小于2 000 Hz。因此,驅動電路需要提供4路大于零的正弦波驅動信號,其峰值應小于2 V。且正弦波頻率各不相等,均小于2 000 Hz。
驅動電路的硬件結構如圖5所示,4路電壓驅動設計均相同。采用16位高精度數/模轉換器LTC1668,將FPGA輸出的數據轉換為模擬電流,再經運放LT1812將電流轉換為電壓。












評論