| ◆ 在現實世界中,存在著大量的這類系統,如炮火自動跟蹤和瞄準目標有效打擊敵人;人造衛星或無人駕駛的航空器按設定的軌道運行;電動機轉速保持恒定;電梯勻速運行并按指令平穩停留某個樓層等等,都是自動控制的結果。 因此,為完成控制系統的分析和設計,首先必須對控制對象、控制系統結構有個明確的了解。一般,可將控制系統分為兩種基本形式:開環控制系統和閉環(反饋)控制系統。
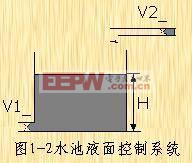
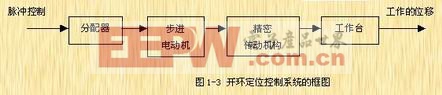
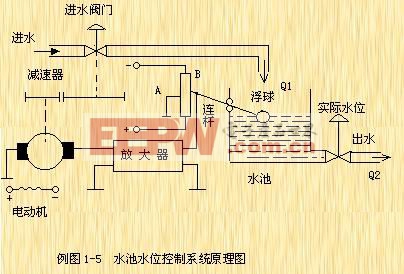
1.2.1 開環控制系統 開環控制系統是一種最簡單的控制方式,在控制器和控制對象間只有正向控制作用,系統的輸出量不會對控制器產生任何影響,如圖1-1所示。在該系統中,對于每一個輸入量,就有一個與之對應的工作狀態和輸出量,系統的精度僅取決于元器件的精度和特性調整的精度。這類系統結構簡單,成本低,容易控制,但是控制精度低,因為如果在控制器或控制對象上存在干擾,或者由于控制器元器件老化,控制對象結構或參數發生變化,均會導致系統輸出的不穩定,使輸出值偏離預期值。正因為如此,開環控制系統一般適用于干擾不強或可預測,控制精度要求不高的場合。 圖1-2所示為一簡單貯槽液面控制系統,這是一個典型的開環系統,要求貯槽的液面H能保持在允許的偏差范內。V1是液體流出閥,V2是液體流入閥。首先根據要求,液面的高度H及V1閥在單位時間內液體的流出量,整定好V2閥的開啟程度,以達到預定的目的。但這是個不精確的控制系統,如果V1閥的輸出流量和V2閥的輸入量受到溫度、液體濃度及其他各種因素的影響而發生了變化,不將液面控制在原標定的H值,而超過了允許的偏差,系統無法糾正偏差。 圖1-3所示為數控機床中廣泛應用的定位系統的框圖。這也是一個開環控制系統,工作臺的位移是該系統的被控制量,它是跟隨著控制信號(控制脈沖)而變化的。顯然,這個系統沒有抗擾動的功能。 如果系統的給定輸入與被控量之間的關系固定,且其內部參數或外來擾動的變化都較小,或這些擾動因素可以事先確定并能給予補償,則采用開環控制也能取得較為滿意的控制效果。 1.2.2.閉環控制系統 如果在控制器和被控對象之間,不僅存在正向作用,而且存在著反向的作用,即系統的輸出量對控制量具有直接的影響,那么這類控制稱為閉環控制, 將檢測出來的輸出量送回到系統的輸入端,并與輸入信號比較,稱為反饋。因此,閉環控制又稱為反饋控制,其控制結構如圖1-4。在這樣的結構下,系統的控制器和控制對象共同構成了前向通道,而反饋裝置構成了系統的反饋通道。 在控制系統中,反饋的概念非常重要。在圖1-4中,如果將反饋環節取得的實際輸出信號加以處理,并在輸入信號中減去這樣的反饋量,再將結果輸入到控制器中去控制被控對象,我們稱這樣的反饋為負反饋;反之,若由輸入量和反饋量相加作為控制器的輸入,則稱為正反饋。 在一個實際的控制系統中,具有正反饋形式的系統一般是不能改進系統性能的,而且容易使系統的性能變壞,因此不被采用。而且有負反饋形式的系統,它通過自動修正偏離量,使系統趨向于給定值,并抑制系統回路中存在的內擾和外擾的影響,最終達到自動控制的目的。通常,反饋控制就是指負反饋控制。 與開環系統比較,閉環控制系統的最大特點是檢測偏差,糾正偏差。從系統結構上看,閉環系統具有反向通道,即反饋;其次,從功能上看,1) 由于增加了反饋通道,系統的控制精度得到了提高,若采用開環控制,要達到同樣的精度,則需高精度的控制器,從而大大增加了成本;2) 由于存在系統的反饋,可以較好地抑制系統各環節中可能存在的擾動和由于器件的老化而引起的結構和參數的不穩定性;3) 反饋環節的存在,同時可較好地改善系統的動態性能。當然,如果引入不適當的反饋,如正反饋,或者參數選擇不恰當,不僅達不到改善系統性能的目的,甚至會導致一個穩定的系統變為不穩定的系統。 在現實世界中,反饋控制系統的形式是多樣的,但一般均可化為圖1-4的形式。 一個水池水位自動控制系統如圖1-5所示。在這個水位控制系統中,水池的進水量Q1來自電動機控制開度的進水閥門,出水量Q2。在用戶用水量Q2隨意變化的情況下,保持水箱水位在希望的高度不變。 希望水位高度由電位器觸頭A設定,浮子測出實際水位高度。由浮子帶動的電位計觸頭B的位置反映實際水位高度。A,B兩點的電位差 反映希望水位與實際水位的偏差。當實際水位低于希望水位時, >0,通過放大器驅使電動機轉動,開大進水閥門,使進水量Q1增加,從而使水位上升。當實際水位上升到希望值時,A、B兩個觸頭在同一位置, =0,電動機停轉,進水閥門開度不變,這時進水量Q1和出水量Q2達到了新的平衡。若實際水位高于希望水位, 0,則電動機使進水閥門關小,進水量減少,實際水位下降。
這個系統是個典型的鎮定系統, 在該系統中:
控制量 希望水位的設定值
被控制量 實際水位
擾動量 出水量Q2
被控對象 水池
測量元件 浮子
比較元件 電位器
放大元件 放大器
執行元件 電動機,減速器,進水閥門 系統的方框圖如1-6所示。控制系統中各元件的分類和方框圖的繪制不是唯一的,只要能正確反映其功能和運動規律即可。 一個位置自動控制系統如圖1-7所示,該系統的作用是使負載L(工作機械)的角位移隨給定的角度的變化而變化,即要求被控量復現控制量 。 指令電位器和反饋電位器組成的橋式電路是測量比較環節,其作用就是測量控制量-輸入角度和被控制量---輸出角度,變成電壓信號和并相減,產生偏差電壓 。 當負載的實際位置 與給定位置 相符時,則 ,電動機不轉動。當負載的實際位置與給定位置不相符時, 和也不相等,偏差電壓 。偏差電壓經過放大器放大,使電動機轉動,通過減速器移動負載L,使負載L和反饋電位器向減少偏差的方向轉動。 一個位置隨動系統,系統的方框圖如圖1-8所
| 















評論