智能救援機(jī)器人的軟硬件設(shè)計(jì)

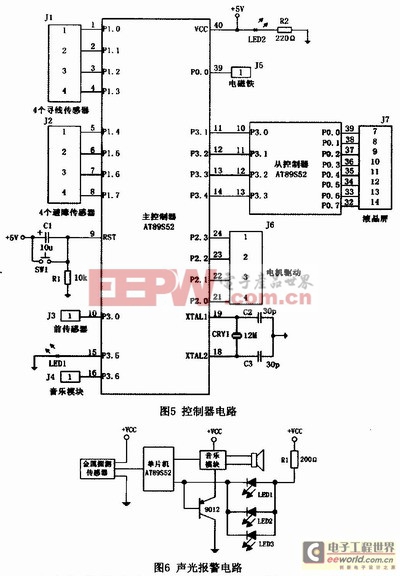
1.3 控制器電路
由于主控制器的任務(wù)較多,電路要求引腳較多,且顯示器的控制程序較為復(fù)雜,我們單獨(dú)配備了一個(gè)同樣的單片機(jī)作為主控制器的輔助部分,通過它來分擔(dān)主控制器的工作,來完成顯示部分的工作。其中主控制器與其它模塊的連接如圖5所示。
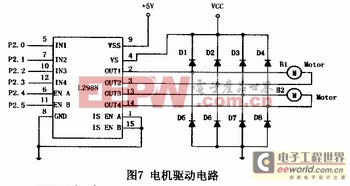
1.4 聲光報(bào)警電路
聲光報(bào)警模塊主要應(yīng)用于搜救報(bào)警電路中,同時(shí)為進(jìn)一步擴(kuò)展應(yīng)用,我們在控制其開關(guān)的同時(shí)引入另一條信號線實(shí)現(xiàn)了對聲音的控制。在搜救過程和平安到達(dá)安置區(qū)時(shí)經(jīng)采用不同頻率和音色的聲音給出表示。尋找硬幣我們采用金屬探測傳感器,當(dāng)發(fā)現(xiàn)金屬時(shí),其信號線上電平從低電平變?yōu)楦唠娖剑|發(fā)單片機(jī)中斷,在單片機(jī)的控制下機(jī)器人停止運(yùn)動,啟動音樂發(fā)生模塊并點(diǎn)亮LED進(jìn)行聲光報(bào)警,具體實(shí)現(xiàn)電路如圖6所示。
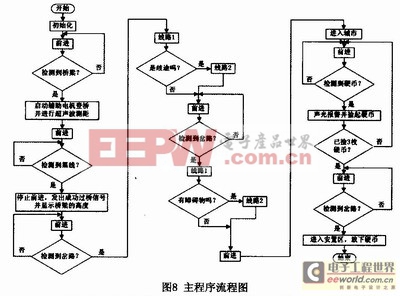
1.5 電機(jī)驅(qū)動電路
單片機(jī)通過傳感器的反饋信號控制電機(jī)正轉(zhuǎn)、反轉(zhuǎn)或者停止,來實(shí)現(xiàn)控制機(jī)器人完成各種動作。L298N是專用電機(jī)驅(qū)動芯片,他可以實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)、剎車、pwm調(diào)速等多種功能,是對機(jī)器人電機(jī)進(jìn)行控制的比較理想的芯片,因此我們采用L298N芯片對兩個(gè)普通電機(jī)進(jìn)行控制。通過編程完全可以控制實(shí)現(xiàn)題目的基本要求和發(fā)揮部分,也可增加各種創(chuàng)新功能。L298N芯片信號電源與驅(qū)動電源的分開,可以根據(jù)需要對電機(jī)的電壓進(jìn)行調(diào)節(jié),其驅(qū)動電路如圖7所示。
1.6 顯示電路
采用MSl602C-1型LCD顯示相應(yīng)的信息。此顯示器模塊的工作電壓為5V左右,支持顯示2行字符,每行可顯示16個(gè)字符,每個(gè)字符由5×7點(diǎn)陣顯示。可以通過編程實(shí)現(xiàn)多種顯示,顯示信息比數(shù)碼管更多,顯示效果更好。
由于主控制器的單片機(jī)任務(wù)較多,電路接線較復(fù)雜,我們采用單獨(dú)的單片機(jī)控制顯示模塊。
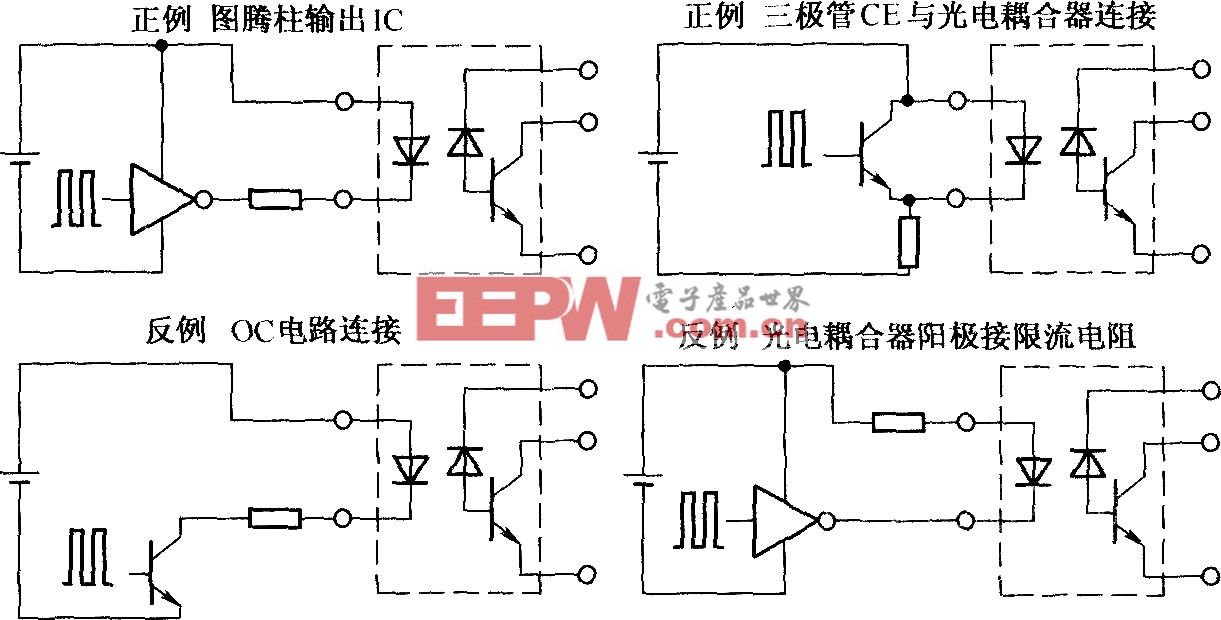
本智能救援機(jī)器人的軟件控制部分采用C語言編程,借助C語言的強(qiáng)大功能來實(shí)現(xiàn)單片機(jī)AT89S52的控制功能。主程序流程圖如圖8所示。
3 結(jié)論
以AT89S52單片機(jī)為核心部件,利用紅外傳感檢測、電機(jī)控制等技術(shù),通過各種方案的討論及嘗試,再經(jīng)過多次的整體軟硬件結(jié)合調(diào)試,不斷地對系統(tǒng)進(jìn)行優(yōu)化,最后智能救援機(jī)器人可以實(shí)現(xiàn);避開障礙物,并尋找到合適的路徑;順利通過受損的橋梁,并能較準(zhǔn)確地測出橋梁的高度;自動識別路線狀況,并根據(jù)實(shí)時(shí)狀況快速做出判斷,準(zhǔn)確控制機(jī)器人的轉(zhuǎn)向;自動顯示所要求的信息;自動尋線前進(jìn),能智能檢測、撿起、放下硬幣;聲光報(bào)警,并有彩燈閃爍;行駛到規(guī)定的地點(diǎn)自動停止并顯示救援結(jié)束。
在設(shè)計(jì)過程中,力求硬件電路簡單,外形美觀,充分發(fā)揮軟件
光電開關(guān)相關(guān)文章:光電開關(guān)原理







評論