雙超聲波防撞小車系統設計

速度我們采取簡單的近似平均進行估算,我們可以計算出系統測距地間隔約為120ms,通過將當前的測距結果與上次測距結果做差比較,根據公式7可以估算出當前速度的近似值:
3.3系統流程(見圖5) 。
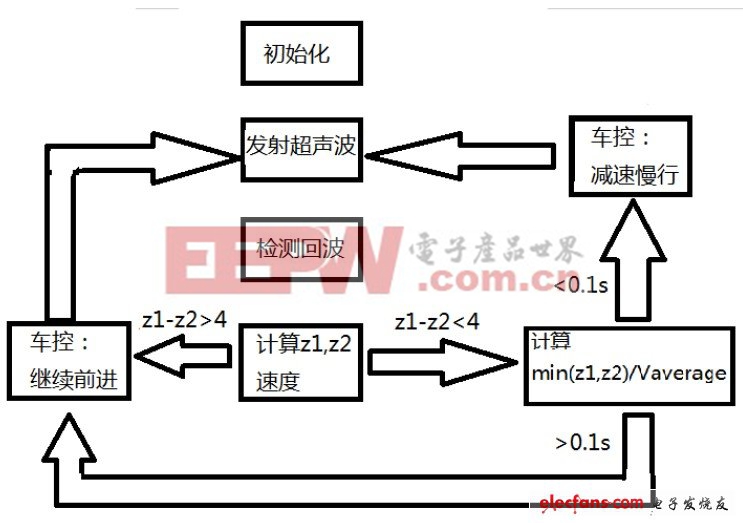
圖5系統流程
4部分測試結果
表1是我們對測距電路單獨的測試結果:(單位cm) 。
表1 測距結果

從此表中可以看出我們的測距電路是很精確的。
圖6是我們對雙接收頭方案的測試結果:


速度我們采取簡單的近似平均進行估算,我們可以計算出系統測距地間隔約為120ms,通過將當前的測距結果與上次測距結果做差比較,根據公式7可以估算出當前速度的近似值:
3.3系統流程(見圖5) 。
圖5系統流程
4部分測試結果
表1是我們對測距電路單獨的測試結果:(單位cm) 。
表1 測距結果
從此表中可以看出我們的測距電路是很精確的。
圖6是我們對雙接收頭方案的測試結果:
評論