基于CAN總線的電梯主控系統軟硬件設計

摘 要:為了升級現有電梯控制系統,給出了一種以LPC2294 為主控芯片的電梯主控系統的設計。軟件上以搶占式多任務實時操作系統μC/OS 為平臺,實現了電梯主控系統中的輸入采集、調度分配、CAN 通信、菜單輸出等任務;硬件建立在LPC2294 基礎上,實現了與變頻器互聯互通、編碼器脈沖反饋的采集、井道開關量的輸入輸出等。
1 引言
隨著城市化建設事業飛速發展,高層建筑和智能建筑大量涌現對電梯控制提出了許多新的要求,與此同時 MCU 與現場總線技術的發展為電梯控制系統不斷完善提供條件。由于現代電梯控制系統在安全性、穩定性、人性化的要求不斷提高,對原有系統在通信方式和電機控制方式等方面進行升級也顯得尤為必要。
在通信方式上,CAN 總線技術的引入改變了RS485 總線在電梯控制上只能構造主從結構的通信網絡、缺少總線仲裁與實時響應效果不理想等方面的缺點,這也使得在現代電梯控制系統的設計時,可以把一些井道開關量信號轎廂控制器來采集,然后通過CAN 通信把有效信號直接傳輸給主控系統,這樣就減少主控系統的負擔,增加系統的安全性;在電機控制上,電梯控制系統經歷了雙速系統、多段速系統與當前采用的模擬量控制系統三個階段,使得乘客在乘坐電梯時舒適感逐步完美,電梯控制系統也得到了不斷改變并趨完善。
2 系統簡介
現代電梯電氣系統由電力驅動系統、電氣控制系統和安全保護系統組成(如圖1)。其中電力驅動系統由曳引電動機、速度反饋裝置(旋轉編碼器)、電動機調速裝置(變頻器)和電源系統等部分組成;電氣控制系統又由電梯主控系統、外呼控制系統、轎廂顯示、門控制系統和外召系統等部分組成;安全保護系統由光幕、急停、門鎖、安全窗等組成。
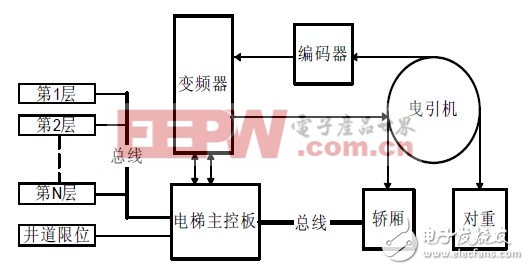
圖1 電梯控制系統結構圖
電氣控制系統中電梯主控系統主要收集電梯井道限位信號和電梯外呼內叫的呼梯信號,然后根據系統參數和系統的當前狀態,與門控制系統和電力驅動系統交互完成整個電梯的運行控制。其在電梯的電氣控制系統中扮演了舉足輕重的作用。
2 控制系統硬件設計
主控系統的硬件設計主要包括微控制器、CAN 通信模塊、光耦輸入、繼電器輸出、存儲器模塊、液晶顯示模塊、按鍵電路、電源模塊、復位模塊和JTAG模塊等。其硬件框圖如圖2 所示。
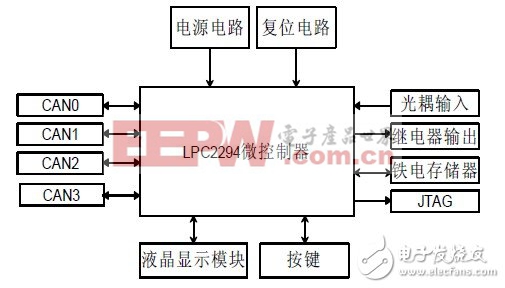
圖2 主控系統的模塊。
在主控系統中,外接了4 路CAN 總線收發器,分別連接到電梯外呼采集板、轎廂采集板、電動機調速裝置(變頻器)、以及群控電梯板。主控系統與電梯電氣系統的其余子系統之間的通信。光耦輸入、繼電器輸出電路的功能主要是讓電梯主控系統采集井道限位信號和輸出井道限位;液晶顯示模塊和按鍵電路則是給電梯調試人員設計的調試接口,用來查看系統運行參數和改變系統運行參數;而鐵電存儲器用來保存系統參數運行參數。
2.1 微控制器模塊
LPC2294 是基于一個支持在線仿真和跟蹤的16/32 位ARM7TDMI-STM CPU,并帶有16KB 的SRAM 和256 KB 板級高速Flash 存儲器。128 位寬度的存儲器接口和獨特的加速結構










評論