聲發射源多傳感器數據融合識別技術

ωi:由于實際聲發射檢測中各傳感器分布在構件的不同區域,如局部結構的不連續,都會給波的傳播模式帶來影響,因而造成對聲發射源的識別的正確性帶來影響,用此權值進行修正;
?i:傳感器i與各目標的最大相關系數,?i=max{CiCj};
? i:傳感器i與各目標相關系數的分布函數, ;
mi(j):傳感器i賦予目標類別j的基本概率分布值;
mi(?):傳感器i賦予識別框架?的基本概率值,即傳感器i的不確定性概率值。
式中的 項,其物理意義在傳感器與識別聲發射源之間的置信測度,與傳感器本身的可靠性無關,主要是聲發射源發出的信號在傳播過程所造成的影響,與具體的檢測對象以及所采用的定位陣列有關。
2.2識別的過程
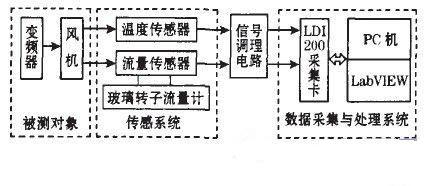
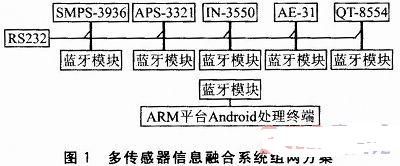
在聲發射源識別過程中,以平面三角形定位為例,當定位組中有聲發射信號發生時,信號的波形分別被該定位組中的三個傳感器接收,經放大并進行一定的濾波調理后,由高速A/D轉換器將模擬信號數字化,然后存儲于計算機中,可供事后分析。在實時采集時,只提取一些主要參數供檢測時監控使用,對于有定位要求的還要顯示定位的事件。采集時一般不進行識別過程的處理,主要是保證不丟失聲發射信號,在信號量較少的情況下,可以選擇實時識別。對信號和通道數較多,而且需要進行實時識別時,可采用分布式系統,下位機實現信號的采集與傳輸,上位機進行實時的處理,并及時顯示結果。識別時,為了提高神經網絡局部識別的能力,需要對原始信號進行預處理以提取信號的特征。小波分析對瞬態信號有較好的局部時頻特性,所以采用小波分析的方法進行信號特征提取。提取特征的信號送入神經網絡進行單個傳感器的局部目標分類。輸出的值用于構造mi(A)和mi(?)函數,再按Dempster合并規則,得到最終的基本可信度的分配值。最后,依照各命題的可信度和似然度等指標,用全局決策規則,得到目標識別的結果。


評論