嵌入式ADC驅動框架:通道控制 + 數據讀取全流程剖析

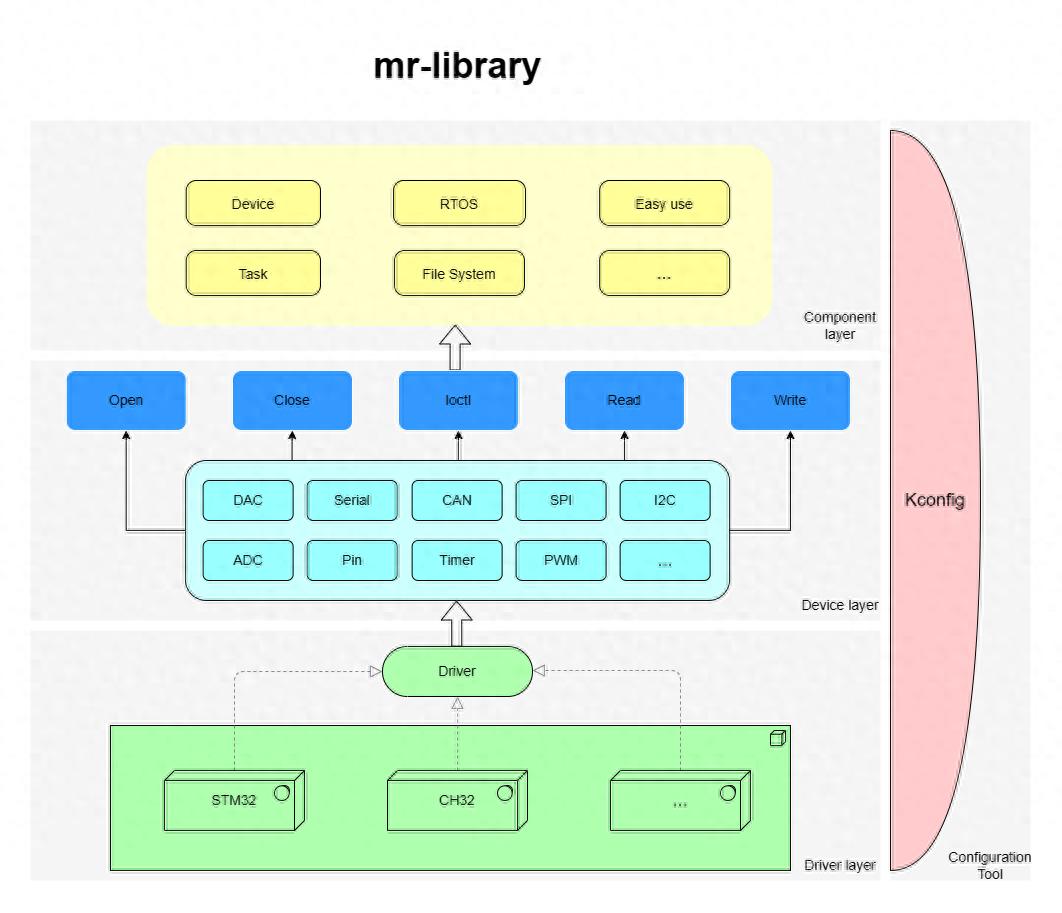
一個嵌入式操作系統或驅動框架中的 ADC(模擬數字轉換器)驅動模塊,用于管理 ADC 通道的配置、讀取、啟停等功能。以下是對各部分的詳細解讀:
一、基本結構和宏控制
#ifdef MR_USING_ADC
條件編譯宏,只有定義了 MR_USING_ADC 的情況下,ADC 驅動代碼才會被編譯進工程。
二、ADC 通道配置相關函數1. adc_channel_set_configure
MR_INLINE int adc_channel_set_configure(struct mr_adc *adc, int channel, struct mr_adc_config config)
功能: 設置某個 ADC 通道是否啟用。
關鍵點:
檢查通道索引是否越界(通過 adc->channels 位圖大小計算最大通道數)。
調用驅動提供的 channel_configure 接口來使能或禁用通道。
用 adc->channels 位圖記錄通道的啟用狀態:
if (config.state == MR_ENABLE) MR_BIT_SET(adc->channels, (1 << channel)); // 置位對應通道 else MR_BIT_CLR(adc->channels, (1 << channel)); // 清除對應通道
2. adc_channel_get_configure
MR_INLINE int adc_channel_get_configure(struct mr_adc *adc, int channel, struct mr_adc_config *config)
功能: 獲取指定通道的配置狀態。
實現:
根據 adc->channels 位圖判斷該通道是否啟用。
三、設備操作函數(open / close / read / ioctl)1. mr_adc_open
static int mr_adc_open(struct mr_dev *dev)
功能: 打開 ADC 設備,調用底層驅動的 configure 接口使能 ADC 模塊。
2. mr_adc_close
static int mr_adc_close(struct mr_dev *dev)
功能: 關閉 ADC 設備。
可選特性:
#ifdef MR_USING_ADC_AUTO_DISABLE
若啟用此宏,會在關閉設備時自動禁用所有開啟的通道,并更新通道狀態位圖。
3. mr_adc_read
static ssize_t mr_adc_read(struct mr_dev *dev, void *buf, size_t count)
功能: 讀取當前設備位置(即某個 ADC 通道)的數據,存入 buf 中。
細節解析:
判斷設備當前位置(即通道號)是否合法,且該通道是否啟用(如果啟用了 MR_USING_ADC_CHANNEL_CHECK 宏)。
循環調用底層驅動的 read 函數讀取多個 uint32_t 數據。
讀取失敗時返回已成功讀取的字節數,或第一個錯誤碼。
4. mr_adc_ioctl
static int mr_adc_ioctl(struct mr_dev *dev, int cmd, void *args)
功能: 控制接口,處理 IO 控制命令。
支持的命令:
MR_IOC_ADC_SET_CHANNEL_CONFIG: 設置通道配置
MR_IOC_ADC_GET_CHANNEL_CONFIG: 獲取通道配置
其他命令返回不支持錯誤 MR_ENOTSUP
四、ADC 驅動注冊函數
int mr_adc_register(struct mr_adc *adc, const char *path, struct mr_drv *drv)
功能: 注冊一個 ADC 設備到系統設備管理中。
步驟如下:
初始化通道位圖(adc->channels = 0)。
填充設備操作函數表(mr_dev_ops)。
調用通用設備注冊函數 mr_dev_register,綁定驅動、路徑、設備類型等信息。
五、結構關系梳理
struct mr_adc
└── struct mr_dev dev // 基類設備對象└── uint32_t channels // 通道啟用狀態位圖struct mr_adc_ops
└── int (*configure)(...) // 總體配置└── int (*channel_configure)(...) // 通道配置└── int (*read)(...) // 通道讀取
通過設備抽象層和函數指針封裝,不同平臺/芯片的 ADC 驅動只需實現 mr_adc_ops 接口即可完成適配。
六、總結亮點與特性
特性 | 描述 |
抽象封裝 | 通過設備結構體和操作表實現面向對象風格的驅動 |
通道管理 | 使用 channels 位圖精確控制每一路 ADC 啟停狀態 |
條件編譯 | 可裁剪功能(如自動關閉通道/檢查通道使能狀態) |
統一接口 | 提供 open/read/ioctl 等標準設備操作接口 |
高可移植性 | 底層 ADC 驅動由 mr_adc_ops 接口抽象,平臺無關 |
開源代碼:
#include "include/device/mr_adc.h"#ifdef MR_USING_ADC
MR_INLINE int adc_channel_set_configure(struct mr_adc *adc,
int channel, struct mr_adc_config config)
{ struct mr_adc_ops *ops = (struct mr_adc_ops *)adc->dev.drv->ops; if ((channel < 0) || (channel >= (sizeof(adc->channels) * 8))) { return MR_EINVAL;
}
int ret = ops->channel_configure(adc, channel, config.state); if (ret < 0) { return ret;
} /* Enable or disable the channel */
if (config.state == MR_ENABLE) {
MR_BIT_SET(adc->channels, (1 << channel));
} else {
MR_BIT_CLR(adc->channels, (1 << channel));
} return MR_EOK;
}
MR_INLINE int adc_channel_get_configure(struct mr_adc *adc,
int channel, struct mr_adc_config *config)
{ if ((channel < 0) || (channel >= (sizeof(adc->channels) * 8))) { return MR_EINVAL;
} /* Get configure */
config->state = MR_BIT_IS_SET(adc->channels, (1 << channel)); return MR_EOK;
}static int mr_adc_open(struct mr_dev *dev)
{ struct mr_adc *adc = (struct mr_adc *)dev; struct mr_adc_ops *ops = (struct mr_adc_ops *)dev->drv->ops; return ops->configure(adc, MR_ENABLE);
}static int mr_adc_close(struct mr_dev *dev)
{ struct mr_adc *adc = (struct mr_adc *)dev; struct mr_adc_ops *ops = (struct mr_adc_ops *)dev->drv->ops;
#ifdef MR_USING_ADC_AUTO_DISABLE /* Disable all channels */
for (size_t i = 0; i < (sizeof(adc->channels) * 8); i++) { if (MR_BIT_IS_SET(adc->channels, (1 << i)) == MR_ENABLE) {
ops->channel_configure(adc, (int)i, MR_DISABLE);
MR_BIT_CLR(adc->channels, (1 << i));
}
}
#endif /* MR_USING_ADC_AUTO_DISABLE */
return ops->configure(adc, MR_DISABLE);
}static ssize_t mr_adc_read(struct mr_dev *dev, void *buf, size_t count)
{ struct mr_adc *adc = (struct mr_adc *)dev; struct mr_adc_ops *ops = (struct mr_adc_ops *)dev->drv->ops;
uint32_t *rd_buf = (uint32_t *)buf;
ssize_t rd_size;
#ifdef MR_USING_ADC_CHANNEL_CHECK /* Check if the channel is enabled */
if ((dev->position < 0) || (MR_BIT_IS_SET(adc->channels, (1 << dev->position)) == MR_DISABLE)) { return MR_EINVAL;
}
#endif /* MR_USING_ADC_CHANNEL_CHECK */
for (rd_size = 0; rd_size < MR_ALIGN_DOWN(count, sizeof(*rd_buf)); rd_size += sizeof(*rd_buf)) {
int ret = ops->read(adc, dev->position, rd_buf); if (ret < 0) { return (rd_size == 0) ? ret : rd_size;
}
rd_buf++;
} return rd_size;
}static int mr_adc_ioctl(struct mr_dev *dev, int cmd, void *args)
{ struct mr_adc *adc = (struct mr_adc *)dev;
switch (cmd) {
case MR_IOC_ADC_SET_CHANNEL_CONFIG: { if (args != MR_NULL) { struct mr_adc_config config = *((struct mr_adc_config *)args);
int ret = adc_channel_set_configure(adc, dev->position, config); if (ret < 0) { return ret;
} return sizeof(config);
} return MR_EINVAL;
}
case MR_IOC_ADC_GET_CHANNEL_CONFIG: { if (args != MR_NULL) { struct mr_adc_config *config = (struct mr_adc_config *)args;
int ret = adc_channel_get_configure(adc, dev->position, config); if (ret < 0) { return ret;
} return sizeof(*config);
} return MR_EINVAL;
}
default: { return MR_ENOTSUP;
}
}
}/**
* @brief This function registers an adc.
*
* @param adc The adc.
* @param path The path of the adc.
* @param drv The driver of the adc.
*
* @return 0 on success, otherwise an error code.
*/int mr_adc_register(struct mr_adc *adc, const char *path, struct mr_drv *drv)
{ static struct mr_dev_ops ops = {mr_adc_open,
mr_adc_close,
mr_adc_read,
MR_NULL,
mr_adc_ioctl,
MR_NULL};
MR_ASSERT(adc != MR_NULL);
MR_ASSERT(path != MR_NULL);
MR_ASSERT(drv != MR_NULL);
MR_ASSERT(drv->ops != MR_NULL); /* Initialize the fields */
adc->channels = 0; /* Register the adc */
return mr_dev_register(&adc->dev, path, MR_DEV_TYPE_ADC, MR_O_RDONLY, &ops, drv);
}
#endif /* MR_USING_ADC */





評論