基于FPGA的DS18B20數(shù)字溫度傳感器測溫實例

1、DS18B20數(shù)字溫度傳感器
本文將使用三段式狀態(tài)機(Moore型)的寫法來對DS18B20進行測溫操作,以便了解DS18B20和熟悉三段式狀態(tài)機的寫法。
1.1、概述
溫度傳感器(temperature transducer)是指能感受溫度并轉(zhuǎn)換成可用輸出信號的傳感器, 是各種傳感器中最常用的一種。隨著現(xiàn)代儀器的發(fā)展,微型化、集成化、數(shù)字化正成為傳感器發(fā)展的一個重要方向。
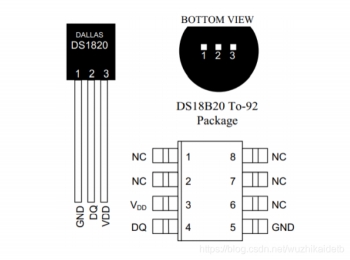
美國DALLAS半導體公司推出的數(shù)字化溫度傳 感器DS18B20采用單總線協(xié)議,即與FPGA接口僅需占用一個I/O端口,無須任何外部元件,直接 將環(huán)境溫度轉(zhuǎn)化成數(shù)字信號,以數(shù)字碼方式串行輸出,從而大大簡化了傳感器與FPGA的接口設計。
引腳如下圖:
1.2、結(jié)構(gòu)組成
DS18B20測量溫度范圍為-55~+125℃,精度為±0.5℃。現(xiàn)場(實時)溫度直接以“單總線” 的數(shù)字方式傳輸,大大提高了系統(tǒng)的抗干擾性。它能直接讀出被測溫度,并且可根據(jù)實際要求通過簡單的編程實現(xiàn)9~l2位的數(shù)字值讀數(shù)方式。它工作在3~5.5V的電壓范圍,采用多種封裝形式,從而使系統(tǒng)設計靈活、方便,設定分辨率及用戶設定的報警溫度存儲在EEPROM中,掉電后 依然保存。其內(nèi)部結(jié)構(gòu)如圖:

高速緩存器的結(jié)構(gòu)框圖如下:
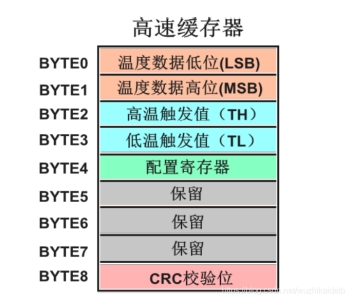
由上圖可知DS18B20的高速緩存器共有9個8位寄存器,其中溫度數(shù)據(jù)低位(LSB)對應字節(jié) 地址0,溫度數(shù)據(jù)高位(MSB)對應字節(jié)地址1,以此類推,配置寄存器的字節(jié)地址為4。溫度數(shù)據(jù)存放的格式如下圖:
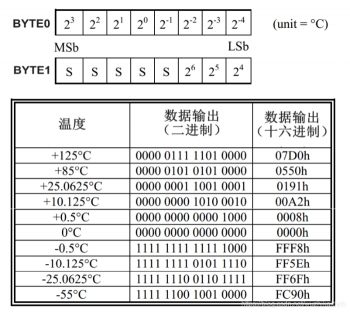
DS18B20在出廠時默認配置溫度數(shù)據(jù)為12位,其中最高位為符號位,即溫度值共11位,最低四位為小數(shù)位。FPGA在讀取溫度數(shù)據(jù)時,一次會讀2字節(jié)共16位,讀完后將低11位的二進制 數(shù)轉(zhuǎn)化為十進制數(shù)后再乘以0.0625得到所測的實際溫度值。
另外還需要判斷溫度的正負,前5 個數(shù)字為符號位,這5位同時變化,我們只需要判斷其中任何一位就可以了。前5位為1時,讀 取的溫度為負值,則測到的數(shù)值需要取反加1再乘以0.0625才可得到實際溫度值。前5位為0時, 讀取的溫度為正值,只要將測得的數(shù)值乘以0.0625即可得到實際溫度值。
高速緩存器中第四個字節(jié)即為配置寄存器,用戶通過改變 R1 和 R0 的值來配置 DS18B20 的分辨率,上電默認為 R1=1 以及 R0=1(12 位分辨率)。需要注意的是轉(zhuǎn)換時間與分辨率時間是有關(guān)系的。另外寄存器中最高位和低 5 位作 為內(nèi)部使用而保留使用,不可被寫入。轉(zhuǎn)換時間與位數(shù)關(guān)系如下表所示:

1.3、通訊步驟
如何操作 DS18B20 去進行對溫度的轉(zhuǎn)換以及讀取呢?步驟如下:
1. 初始化
1-Wire 總線上的所有事件都必須以初始化為開始。初始化序列由總線上的主設備發(fā)出的復位脈沖以及緊跟著從設備回應的存在脈沖構(gòu)成。該存在脈沖是讓總線主設備知道 DS18B20 在總線上并準備好運行。所有具體時序都在1.4章節(jié)介紹。
2. ROM命令
當初始化完成之后,就可以執(zhí)行 ROM 命令。這些命令是對每個設備的 64 位 ROM 編 碼進行操作的,當總線上連接有多個設備時,可以通過這些命令識別各個設備。總共包含 有 5 種 ROM 命令,每個命令的長度都是 8bit。
搜索 ROM[F0h]:當系統(tǒng)上電初始化后,主設備可識別該總線上所有的從設備的 ROM 編碼,這樣就可以使得主設備確定總線上的從設備的類型以及數(shù)量。
讀 ROM[33h] :該命令允許主設備讀取 DS18B20 的 64 位 ROM 編碼,只有在總線上只有一個 DS18B20 時才能使用這個命令。如果總線上存在多個從設備,發(fā)送此命令,則當所有從設 備都會回應時,將會引起數(shù)據(jù)沖突。
匹配 ROM[55h] :該匹配 ROM 命令之后接著發(fā)出 64 位 ROM 編碼,使主設備在多點總線上定位一只特定的 DS18B20。只有和 64 位 ROM 序列完全匹配的 DS18B20 才會做出響應。總線上的其 他從設備都將等待下一個復位脈沖。此命令在總線上有單個或多個器件時都可以使用。
跳過 ROM[CCh] :這條命令可以不用提供 64 位 ROM 編碼就進行下一步操作,在單點總線(一個 DS18B20 傳感器)情況下可以節(jié)省時間。如果總線上不止一個從設備,在跳過 ROM 命令 之后跟著發(fā)一條讀命令,則所有從設備將會同時執(zhí)行溫度轉(zhuǎn)換,總線上就會發(fā)生數(shù)據(jù)沖突。
警報搜索[ECh] :該命令的操作與跳過 ROM 命令基本相同,但是不同的是只有溫度高于 TH 或低于 TL (達到報警條件)的從設備才會響應。只要不掉電,警報狀態(tài)將一直保持,直到溫度不在警報范圍內(nèi)為止。
3. 功能命令
當總線上的主設備通過 ROM 命令確定了哪個 DS18B20 可以進行通信時,主設備就可 以向其中一個從設備發(fā)送功能命令。這些命令可以使得主設備操控從設備進行一系列的操作。
溫度轉(zhuǎn)換[44h]: 此命令為初始化單次溫度轉(zhuǎn)換,溫度轉(zhuǎn)換完后,轉(zhuǎn)換的溫度數(shù)據(jù)會寄存在高速緩存器 的 byte0(溫度數(shù)據(jù)低八位)和 byte1(溫度數(shù)據(jù)高八位)中,之后 DS18B20 恢復到低功耗 的閑置狀態(tài)。如果總線在該命令后發(fā)出讀時隙,若 DS18B20 正在進行溫度轉(zhuǎn)換則會響應 “0”,若完成了溫度轉(zhuǎn)換則響應“1”。如果是用的“寄生電源”供電模式,則在命令發(fā) 出后應立即強制拉高總線,拉高時間應大于時序要求。
寫入暫存器[4Eh] :該命令使得主設備向高速緩存器寫入 3 個字節(jié)的數(shù)據(jù)。第一個字節(jié)寫入高速緩存器的 byte2 中(TH 寄存器),第二個字節(jié)的數(shù)據(jù)寫入 byte3 中(TL 寄存器),第三個字節(jié)的數(shù)據(jù)寫入 byte4 中(配置寄存器)。所有的數(shù)據(jù)都是由低位到高位的順序?qū)懭搿臀豢呻S時中斷寫入。
讀取高速緩存器[BEh] :讀取高速緩存器里的值,從 byte0(溫度低八位)開始一直讀到 byte8(CRC 校驗),每個字節(jié)的數(shù)據(jù)從低位開始傳送。若是不想讀取這么多數(shù)據(jù)則在讀取數(shù)據(jù)時隨時可以通過復位來終止。
復制高速緩存器[48h] :該命令是將高速緩存器中的 TH(byte2)、TL(byte3)以及配置寄存器(byte4)里的 值拷貝到非易失性的存儲器 EEPROM 里。如果總線控制器在這條命令之后跟著發(fā)出讀時 隙,而 DS18B20 又正在忙于把暫存器拷貝到 EEPROM 存儲器,DS18B20 就會輸出一個 “0”,如果拷貝結(jié)束的話,DS18B20 則輸出“1”。如果設備采用“寄生電源”供電模 式,則在該命令發(fā)送后,必須立即強制拉高總線至少 10ms。
召回 EEPROM[B8h] :該命令將溫度報警觸發(fā)值(TH 和 TL)及配置寄存器的數(shù)據(jù)從 EEPROM 中召回至高速 緩存器中。這個操作會在上電后自動執(zhí)行一次,所以在上電期間暫存器中一直會存在有效 的數(shù)據(jù)。若在召回命令之后啟動讀時隙,若 DS18B20 正在進行召回 EEPROM 則會響應 “0”,若召回完成則響應“1”。
讀取供電模式[B4h] :該命令可以讀取總線上的 DS18B20 是否是由“寄生電源”供電。在讀取數(shù)據(jù)時序中 “0”表示“寄生電源供”模式供電,“1”表示外部電源供電。
1.4、總線時序
初始化—復位和存在脈沖
與 DS18B20 所有的通信都是由初始化開始的,初始化由主設備發(fā)出的復位脈沖及 DS18B20 響應的存在脈沖組成。如下圖 所示。當 DS18B20 響應復位信號的存在脈沖 后,則其向主設備表明其在該總線上,并且已經(jīng)做好了執(zhí)行命令的準備。 在初始化狀態(tài),總線上的主設備通過拉低 1-Wire 總線最少 480us 來表示發(fā)送復位脈 沖。發(fā)送完之后,主設備要釋放總線進入接收模式。當總線釋放后,上拉電阻將 1- Wire 總線拉至高電平。當 DS18B20 檢測到該上升沿信號后,其等待 15us 至 60us 后將總線 拉低 60us 至 240us 來實現(xiàn)發(fā)送一個存在脈沖。

寫時隙
主設備通過寫時隙將命令寫入 DS18B20 中,寫時隙有兩種情況:寫“1”和寫“0”時 隙。主設備通過寫 1 時隙來向 DS18B20 中寫入邏輯 1,通過寫 0 時隙來向 DS18B20 中寫入 邏輯 0。當主設備將總線從高電平拉至低電平時,啟動寫時隙,所有的寫時隙持續(xù)時間最 少為 60us,每個寫時隙間的恢復時間最少為 1us。 當總線(DQ)拉低后,DS18B20 在 15us 至 60us 之間對總線進行采樣,如果采的 DQ 為高電平則發(fā)生寫 1,如果為低電平則發(fā)生寫 0,如下圖所示(圖中的總線控制器即為主設備)。 如果要產(chǎn)生寫 1 時隙,必須先將總線拉至邏輯低電平然后釋放總線,允許總線在寫 隙開始后 15us 內(nèi)上拉至高電平。若要產(chǎn)生寫 0 時隙,必須將總線拉至邏輯低電平并保持不 變最少 60us。

讀時隙
當我們發(fā)送完讀取供電模式[B4h]或讀高速緩存器[BEh]命令時,必須及時地生成讀時隙,只有在讀時隙 DS18B20 才能向主設備傳送數(shù)據(jù)。每個讀時隙最小必須有 60us 的持續(xù) 時間以及每個讀時隙間至少要有 1us 的恢復時間。當主設備將總線從高電平拉至低電平超 過 1us,啟動讀時隙,如下圖所示。當啟動讀時隙后,DS18B20 將會向主設備發(fā)送“0”或者“1”。DS18B20 通過將總線 拉高來發(fā)送 1,將總線拉低來發(fā)送 0 。當讀時隙完成后,DQ 引腳將通過上拉電阻將總線拉高至高電平的閑置狀態(tài)。從 DS18B20 中輸出的數(shù)據(jù)在啟動讀時隙后的 15us 內(nèi)有效,所以,主設備在讀時隙開始后的 15us 內(nèi)必須釋放總線,并且對總線進行采樣。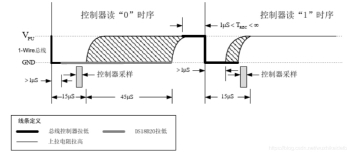
2、采用三段式狀態(tài)機測試
接下來將采用三段式狀態(tài)機對DS18B20進行測溫操作。
2.1、整體設計
因為本文只寫DS18B20的驅(qū)動,不涉及到其他模塊(如數(shù)碼管),所以模塊框圖如下:
信號說明如下:
sys_clk:系統(tǒng)時鐘,50M
rst_n:低電平有效的復位信號
dq:單總線(雙向信號)
temp_data:輸出的有效數(shù)據(jù),位寬20
sign:輸出給數(shù)碼管的正負信號,1表示數(shù)據(jù)為負數(shù);0表示數(shù)據(jù)為正數(shù)
根據(jù)上面對DS18B20的介紹,可以概括出整個的測溫流程如下:
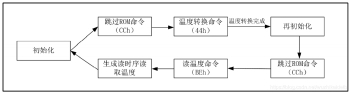
2.2、狀態(tài)機設計
三段式狀態(tài)機的概念可以參考:狀態(tài)機(一段式、二段式、三段式)、摩爾型(Moore)和米勒型(Mealy)
當知道了 DS18B20 的控制流程之后,我們可以借助狀態(tài)機來進一步了解它是如何跳轉(zhuǎn)的: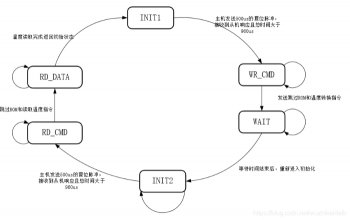
下面對各狀態(tài)說明:
INIT1:每次操作前都需要進行初始化操作。在這個狀態(tài)主機會使用一個計數(shù)器從0計數(shù)到1000us。一開始就先拉低總線500us,然后釋放總線;在570us處采集總線電平,若為0,則說明總線進行了響應,初始化完成。
WR_CMD:在這個狀態(tài)一起發(fā)送跳過ROM和溫度轉(zhuǎn)換指令。使用一個計數(shù)器計時,使用另一個計數(shù)器則對發(fā)送的數(shù)據(jù)個數(shù)計數(shù),當成功發(fā)送16個數(shù)據(jù)后,發(fā)送命令完成
WAIT:這個狀態(tài)為延時狀態(tài),滿足發(fā)送溫度轉(zhuǎn)換指令后的等待時間750ms。使用一個計數(shù)器計時,時間滿足750ms則說明計時完成。
INIT2:第二次操作前的初始化操作。所有操作同INIT1,不贅述。
RD_CMD:在這個狀態(tài)一起發(fā)送跳過ROM和讀取溫度指令。使用一個計數(shù)器計時,使用另一個計數(shù)器則對發(fā)送的數(shù)據(jù)個數(shù)計數(shù),當成功發(fā)送16個數(shù)據(jù)后,發(fā)送命令完成
RD_DATA:在這個狀態(tài)讀取從機返回的16位溫度數(shù)據(jù)。使用一個計數(shù)器計時,使用另一個計數(shù)器則對讀取的數(shù)據(jù)個數(shù)計數(shù),使用一個寄存器寄存讀取到的溫度數(shù)據(jù),當成功讀取16個數(shù)據(jù)后,接收命令完成
需要注意:信號線dq是一個雙向信號,所以使用時要用使用三態(tài)門的方法來操作,具體方法參考:如何規(guī)范地使用雙向(inout)信號?
2.3、Verilog代碼
根據(jù)上面的狀態(tài)分析圖,編寫Verilog代碼如下:(這里就不寫分析了,注釋已經(jīng)寫得很詳細了,如果你看到了這邊文章且這段代碼又不懂的地方,可以評論給我)
//==================================================================
//--3段式狀態(tài)機(Moore)實現(xiàn)的DS18B20驅(qū)動
//==================================================================
//------------<模塊及端口聲明>----------------------------------------
module ds18b20_dri(
input clk , //系統(tǒng)時鐘,50M
input rst_n , //低電平有效的復位信號
inout dq , //單總線(雙向信號)
output reg [19:0] temp_data , // 轉(zhuǎn)換后得到的溫度值
output reg sign // 符號位
);
//------------<參數(shù)定義>----------------------------------------------
//狀態(tài)機狀態(tài)定義
localparam INIT1 = 6'b000001 ,
WR_CMD = 6'b000010 ,
WAIT = 6'b000100 ,
INIT2 = 6'b001000 ,
RD_CMD = 6'b010000 ,
RD_DATA = 6'b100000 ;
//時間參數(shù)定義
localparam T_INIT = 1000 , //初始化最大時間,單位us
T_WAIT = 780_000 ; //轉(zhuǎn)換等待延時,單位us
//命令定義
localparam WR_CMD_DATA = 16'h44cc, //跳過 ROM 及溫度轉(zhuǎn)換命令,低位在前
RD_CMD_DATA = 16'hbecc; //跳過 ROM 及讀取溫度命令,低位在前
//------------<reg定義>----------------------------------------------
reg [5:0] cur_state ; //現(xiàn)態(tài)
reg [5:0] next_state ; //次態(tài)
reg [4:0] cnt ; //50分頻計數(shù)器,1Mhz(1us)
reg dq_out ; //雙向總線輸出
reg dq_en ; //雙向總線輸出使能,1則輸出,0則高阻態(tài)
reg flag_ack ; //從機響應標志信號
reg clk_us ; //us時鐘
reg [19:0] cnt_us ; //us計數(shù)器,最大可表示1048ms
reg [3:0] bit_cnt ; //接收數(shù)據(jù)計數(shù)器
reg [15:0] data_temp ; //讀取的溫度數(shù)據(jù)寄存
reg [15:0] data ; //未處理的原始溫度數(shù)據(jù)
//------------<wire定義>----------------------------------------------
wire dq_in ; //雙向總線輸入
//==================================================================
//===========================<main code>===========================
//==================================================================
//-----------------------------------------------------------------------
//--雙向端口使用方式
//-----------------------------------------------------------------------
assign dq_in = dq; //高阻態(tài)的話,則把總線上的數(shù)據(jù)賦給dq_in
assign dq = dq_en ? dq_out : 1'bz; //使能1則輸出,0則高阻態(tài)
//-----------------------------------------------------------------------
//--us時鐘生成,因為時序都是以us為單位,所以生成一個1us的時鐘會比較方便
//-----------------------------------------------------------------------
//50分頻計數(shù)
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
cnt <= 5'd0;
else if(cnt == 5'd24) //每25個時鐘500ns清零
cnt <= 5'd0;
else
cnt <= cnt + 1'd1;
end
//生成1us時鐘
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
clk_us <= 1'b0;
else if(cnt == 5'd24) //每500ns
clk_us <= ~clk_us; //時鐘反轉(zhuǎn)
else
clk_us <= clk_us;
end
//-----------------------------------------------------------------------
//--三段式狀態(tài)機
//-----------------------------------------------------------------------
//狀態(tài)機第一段:同步時序描述狀態(tài)轉(zhuǎn)移
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)
cur_state <= INIT1;
else
cur_state <= next_state;
end
//狀態(tài)機第二段:組合邏輯判斷狀態(tài)轉(zhuǎn)移條件,描述狀態(tài)轉(zhuǎn)移規(guī)律以及輸出
always @(*)begin
next_state = INIT1;
case(cur_state)
INIT1 :begin
if(cnt_us == T_INIT && flag_ack) //滿足初始化時間且接收到了從機的響應信號
next_state = WR_CMD; //跳轉(zhuǎn)到寫狀態(tài)
else
next_state = INIT1; //不滿足則保持原有狀態(tài)
end
WR_CMD :begin
if(bit_cnt == 4'd15 && cnt_us == 20'd62) //寫完了16個數(shù)據(jù),寫跳過ROM和寫溫度轉(zhuǎn)換命令
next_state = WAIT; //跳轉(zhuǎn)到等待狀態(tài),等待溫度轉(zhuǎn)換完成
else
next_state = WR_CMD; //不滿足則保持原有狀態(tài)
end
WAIT :begin
if(cnt_us == T_WAIT) //等待時間結(jié)束
next_state = INIT2;
else
next_state = WAIT;
end
INIT2 :begin
if(cnt_us == T_INIT && flag_ack) //再進行初始化,時序同INIT1
next_state = RD_CMD;
else
next_state = INIT2;
end
RD_CMD :begin
if(bit_cnt == 4'd15 && cnt_us == 20'd62) //寫完了16個數(shù)據(jù),寫跳過ROM和寫讀取溫度轉(zhuǎn)換命令
next_state = RD_DATA; //跳轉(zhuǎn)到讀取溫度數(shù)據(jù)狀態(tài)
else
next_state = RD_CMD;
end
RD_DATA :begin
if(bit_cnt == 4'd15 && cnt_us == 20'd62) //讀取完了16個數(shù)據(jù)
next_state = INIT1; //跳轉(zhuǎn)到初始化狀態(tài),開始新一輪溫度采集
else
next_state = RD_DATA;
end
default:next_state = INIT1; //默認初始化狀態(tài)
endcase
end
//狀態(tài)機第三段:時序邏輯描述輸出
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin //默認輸出
dq_en <= 1'b0;
dq_out <= 1'b0;
flag_ack <= 1'b0;
cnt_us <= 20'd0;
bit_cnt <= 4'd0;
end
else begin
case(cur_state)
INIT1 :begin
if(cnt_us == T_INIT)begin //時間計數(shù)到最大值(初始化時間)
cnt_us <= 20'd0; //計數(shù)器清零
flag_ack <= 1'b0; //從機響應標志信號拉低
end
else begin //沒有計數(shù)到最大值
cnt_us <= cnt_us + 1'd1; //計數(shù)器計數(shù)
if(cnt_us <= 20'd499)begin //小于500us時
dq_en <= 1'b1; //控制總線
dq_out <= 1'b0; //輸出0,即拉低總線
end
else begin //在500us處
dq_en <= 1'b0; //釋放總線,等待從機響應
if (cnt_us == 20'd570 && !dq_in) //在570us處采集總線電平,如果為0則說明從機響應了
flag_ack <= 1'b1; //拉高從機響應標志信號
end
end
end
WR_CMD :begin
if(cnt_us == 20'd62)begin //一個寫時隙周期63us,滿足計時條件則
cnt_us <= 20'd0; //清空計數(shù)器
dq_en <= 1'b0; //釋放總線
if(bit_cnt == 4'd15) //如果數(shù)據(jù)已經(jīng)寫了15個
bit_cnt <= 4'd0; //則清空
else //沒寫15個
bit_cnt <= bit_cnt + 1'd1; //則數(shù)據(jù)計數(shù)器+1,代表寫入了一個數(shù)據(jù)
end
else begin //一個寫時隙周期63us未完成
cnt_us <= cnt_us + 1'd1; //計數(shù)器一直計數(shù)
if(cnt_us <= 20'd1)begin //0~1us(每兩個寫數(shù)據(jù)之間需要間隔2us)
dq_en <= 1'b1; //拉低總線
dq_out <= 1'b0;
end
else begin
if (WR_CMD_DATA[bit_cnt] == 1'b0)begin //需要寫入的數(shù)據(jù)為0
dq_en <= 1'b1; //拉低總線
dq_out <= 1'b0; //
end
else if(WR_CMD_DATA[bit_cnt] == 1'b1)begin
dq_en <= 1'b0; //需要寫入的數(shù)據(jù)為1
dq_out <= 1'b0; //釋放總線
end
end
end
end
WAIT :begin //等待溫度轉(zhuǎn)換完成
dq_en <= 1'b1; //拉低總線兼容寄生電源模式
dq_out <= 1'b1;
if(cnt_us == T_WAIT) //計數(shù)完成
cnt_us <= 20'd0;
else
cnt_us <= cnt_us + 1'd1;
end
INIT2 :begin //第二次初始化,時序同INIT1
if(cnt_us == T_INIT)begin
cnt_us <= 20'd0;
flag_ack <= 1'b0;
end
else begin
cnt_us <= cnt_us + 1'd1;
if(cnt_us <= 20'd499)begin
dq_en <= 1'b1;
dq_out <= 1'b0;
end
else begin
dq_en <= 1'b0;
if (cnt_us == 20'd570 && !dq_in)
flag_ack <= 1'b1;
end
end
end
RD_CMD :begin //寫16個數(shù)據(jù),時序同WR_CMD
if(cnt_us == 20'd62)begin
cnt_us <= 20'd0;
dq_en <= 1'b0;
if(bit_cnt == 4'd15)
bit_cnt <= 4'd0;
else
bit_cnt <= bit_cnt + 1'd1;
end
else begin
cnt_us <= cnt_us + 1'd1;
if(cnt_us <= 20'd1)begin
dq_en <= 1'b1;
dq_out <= 1'b0;
end
else begin
if (RD_CMD_DATA[bit_cnt] == 1'b0)begin
dq_en <= 1'b1;
dq_out <= 1'b0;
end
else if(RD_CMD_DATA[bit_cnt] == 1'b1)begin
dq_en <= 1'b0;
dq_out <= 1'b0;
end
end
end
end
RD_DATA :begin //讀16位溫度數(shù)據(jù)
if(cnt_us == 20'd62)begin //一個讀時隙周期63us,滿足計時條件則
cnt_us <= 20'd0; //清空計數(shù)器
dq_en <= 1'b0; //釋放總線
if(bit_cnt == 4'd15)begin //如果數(shù)據(jù)已經(jīng)讀取了15個
bit_cnt <= 4'd0; //則清空
data <= data_temp; //臨時的數(shù)據(jù)賦值給data
end
else begin //如果數(shù)據(jù)沒有讀取15個
bit_cnt <= bit_cnt + 1'd1; //則數(shù)據(jù)計數(shù)器+1,意味著讀取了一個數(shù)據(jù)
data <= data;
end
end
else begin //一個讀時隙周期還沒結(jié)束
cnt_us <= cnt_us + 1'd1; //計數(shù)器累加
if(cnt_us <= 20'd1)begin //0~1us(每兩個讀數(shù)據(jù)之間需要間隔2us)
dq_en <= 1'b1; //拉低總線
dq_out <= 1'b0;
end
else begin //2us后
dq_en <= 1'b0; //釋放總掉線
if (cnt_us == 20'd10) //在10us處讀取總線電平
data_temp <= {dq,data_temp[15:1]}; //讀取總線電平
end
end
end
default:;
endcase
end
end
//-----------------------------------------------------------------------
//--12位溫度數(shù)據(jù)處理
//-----------------------------------------------------------------------
always @(posedge clk_us or negedge rst_n)begin
if(!rst_n)begin //初始狀態(tài)
temp_data <= 20'd0;
sign <= 1'b0;
end
else begin
if(!data[15])begin //最高位為0則溫度為正
sign <= 1'b0; //標志位為正
temp_data <= data[10:0] * 11'd625 /7'd100; //12位溫度數(shù)據(jù)處理
end
else if(data[15])begin //最高位為1則溫度為負
sign <= 1'b1; //標志位為負
temp_data <= (~data[10:0] + 1'b1)* 11'd625 /7'd100; //12位溫度數(shù)據(jù)處理
end
end
end
endmodule2.4、調(diào)試 因為通訊過程涉及到從機的響應,我又找不到相應的器件模型,仿真就不搞了。 直接使用signaltap抓下波形: 上圖中: 狀態(tài)機開始運行,進入INTI1的初始化狀態(tài) dht11_en拉高同時dht11_out為0,說明主機拉低了總線 主機拉低總線后在500us處釋放了總線,總線被上拉電阻拉高 在528us處總線被從機拉低,直至637us從機才釋放了總線,說明從機發(fā)送了響應 在570us處因為總線被從機拉低,所以拉高了響應信號flag_ack,直到進入下個狀態(tài)才將flag_ack拉低 上圖中: 狀態(tài)機從INTI1的初始化狀態(tài)跳轉(zhuǎn)到寫入ROM和溫度轉(zhuǎn)換命令的狀態(tài)WR_CMD bit_cnt從0計數(shù)到F,說明寫入了16個數(shù)據(jù);與此同時,總線上也在分別寫入“0”和“1” 上圖中: 狀態(tài)機從WAIT狀態(tài)跳轉(zhuǎn)到初始化狀態(tài)INIT2 cnt_us計數(shù)器從780000清零,說明此時延時了780ms的時間以便完成溫度轉(zhuǎn)換 上圖中: 狀態(tài)機從狀態(tài)RD_CMD跳轉(zhuǎn)到數(shù)據(jù)讀取狀態(tài)RD_DATA bit_cnt從0計數(shù)到F,說明讀取了16個數(shù)據(jù);與此同時,總線上也在分別輸出“0”和“1” 上圖中: data是直接從DS18B20溫度寄存器中讀取的數(shù)據(jù)0000000111111001 temp_data是處理后發(fā)送給數(shù)碼管顯示的數(shù)據(jù)3156,對應攝氏度31.56 3、上板調(diào)試 添加數(shù)碼管顯示模塊,編譯工程,板卡顯示如下: 和用調(diào)試軟件抓取的結(jié)果一致。 4、參考 DS18B20—Dalas Semiconductor FPGA Verilog 開發(fā)實戰(zhàn)指南—基于 Intel Cyclone IV—野火電子













評論