自動點膠機在自動環氧粘片中的應用

作者簡介:劉鳳華,(1987—),山東臨沂人,工程師,主要從事微波模塊自動化組裝工藝研究。
本文引用地址:http://www.104case.com/article/202108/427788.htm0 引言
自動點膠機是集機械、光、電、氣為一體的自動化點膠設備,廣泛應用于LCD、CCD、SMT、BGA、LED 和微組裝領域。目前自動點膠機的高端產品主要是國外品牌,國內品牌受限于點膠閥的設計制造工藝,主要應用于一些低端制造領域。最早研制自動化點膠機的美國諾信公司依然是該領域的領導者,Spectrum II 系列產品暢銷;日本武藏和德國Marco 產品質量性能優異;美國PVA 公司在自動涂覆機領域技術領先;瑞典Mycronic 公司在錫膏設備點膠上一家獨大[1]。本文主要以諾信螺旋桿式機型為例介紹自動點膠機在復雜微波模塊組裝中的應用。
1 點膠機的分類
常用自動點膠機根據點膠方式和點膠閥的不同可按照表1 所示進行劃分。目前自動環氧粘片中常用的點膠方式是螺旋桿式。螺旋桿式優點是精度較高,對各類導電膠都比較適用,點膠通用性強;缺點是需要高精度的點膠高度定位,點膠速度慢,螺旋桿組件難清洗。

2 點膠機的選型
在自動環氧粘片過程中可以單獨采用點膠、貼片一體的自動環氧粘片機;也可以采用在前端放置自動點膠機,后端放置自動環氧粘片機,點膠、貼片同步流水的生產模式。對于簡單平面類產品建議選擇帶分軸點膠功能的自動環氧粘片機,以提高效率和減少過程周轉。對于復雜腔槽類微波模塊,建議不用自動環氧粘片機自身的點膠功能,而是選用自動點膠機單獨點膠的模式。此種生產模式的優點是便于監控和及時調整點膠狀態,防止出現點膠不良品影響最終的產品粘貼。選擇點膠機時要進行自動點膠機和自動粘片機的效率匹配,通過調整設備數量配比,實現設備效率的最大化利用。另外,并不是所有的自動環氧粘片機都適合搭配自動點膠機使用,要提前進行選型調研。MRSI和Palomar 自動環氧粘片機主要是點膠、貼片共軸;Datacon 自動環氧粘片機一個點膠分軸、一個點膠、貼片共軸;ASM 自動環氧粘片機則是兩個點膠分軸,一個貼片分軸,而且必須點膠、貼片一體,不能單獨拆分點膠、貼片功能。
3 點膠機的原理
3.1 點膠高度測量
接觸式點膠機對點膠高度的定位要求極高,點膠高度的測量一般選用激光位移傳感器,其相比機械測高的優勢是速度快,缺點是應對深腔窄槽產品時會出現光學遮擋問題。激光測高原理如圖1 所示。

圖1 斜射式激光位移傳感器原理
先對相機的鏡頭高度和測高器的鏡頭高度進行校準,保證相機成像清晰度高度滿足測高器的量程范圍,然后以中心點高度為基準,位移高度h,相應接收端的光點位移h?,根據相似三角形的比例關系,計算得出:
H=ah?sinθ3cosθ1b sin(θ1+θ2)-h? sin(θ1+θ2+θ3) (1)
從而計算出被測面的距離。式中θ1 為發射光與被測面法線的夾角,θ2 為反射光與被測面法線的夾角,θ3為接收光與光點探測器的夾角,a 為激光反射點與接收透鏡前主面的距離,b 為接收透鏡后主面到成像面中心點的距離[2]。在實際設置測高點時要分清發射端和接收端的相對位置,根據激光測高器的類型靈活運用,特別是深腔窄槽產品中,更應該合理規避光學遮擋引起的測高不準確的問題。
3.2 點膠坐標定位
點膠X/Y 位置的定位是采用光學識別產品特征點,通過識別點的校對建立新的局部點膠坐標系,原理如圖2 所示。

圖2 點膠定位原理
識別點對局部坐標系進行判定和修正,所以初始編程的產品擺放一定要水平,識別點也選擇最清晰無干擾的模型位置。確定X/Y 坐標系后,再根據測量的點膠高度確定最終的X/Y/Z 三維坐標系,通過光柵尺的閉環反饋控制實現精確點膠。另外,為保證點膠精度的穩定性,點膠針頭需選擇不銹鋼材質進行一體加工,材質太軟或者針管太細都不利于過程中點膠精度的保持。
3.3 點膠參數控制
點膠的主要影響參數如表2 所示。

各種控制參數間存在相互影響,參數設定時需綜合考慮,不能走極端。先根據膠體的特性確定合適的吸附真空和出膠速度,然后校膠確認提前開閥時間、提前關閥距離和點膠完成后的保持時間,最后根據膠量需求調節氣壓壓力。使用過程中膠體總量的減少和隨時間出現的特性變化會導致點膠效果出現惡化,需要及時檢查、調整各項點膠參數,保證最終點膠效果的穩定性。
4 膠體性能對點膠的影響
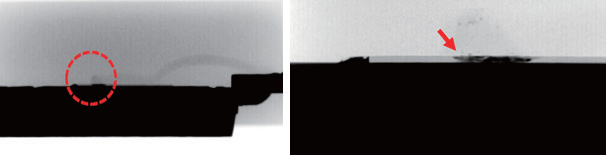
除點膠機本身性能外,膠體的性能也同樣影響最終的點膠效果。因為點膠機用膠筒儲膠、點膠,膠體容易受重力影響出現分離現象,所以要求膠體應該混合均勻,且能長時間保持狀態穩定。從指標上看應該是靜態黏度相對大,利于保持狀態;動態黏度相對小,利于點膠;整體保持一個合理的觸變[3]。膠狀態均勻穩定,可以通過調節點膠機參數適應黏度的波動。如果膠的狀態不均勻穩定,容易快速出現銀粉和環氧樹脂的分離、沉淀現象,則會導致生產的異常波動,影響產品質量和生產效率,膠的浪費也會變得很嚴重。同種導電膠不同批次,存在的狀態、性能差異如圖3 和圖4 所示。另外,膠體最好采用真空攪拌機類設備進行自動攪拌、脫泡,人工攪膠很難滿足點膠機的使用要求。

圖3 同種膠不同批次攪拌前的狀態差異

圖4 同種膠不同批次攪拌后的狀態差異
5 結束語
自動點膠機在復雜微波模塊微組裝中的應用較廣泛,單獨點膠后既可以自動粘片也可以手工粘片,給用戶提供了多種選擇,不再拘泥于自動環氧粘片機單一固定的工作模式。自動點膠機的點膠效果也非常出色,遠勝于人工涂膠和絲網印刷。隨著高頻化、小型化的發展趨勢,接觸式點膠將會越來越難以滿足市場需求;而非接觸噴射式點膠不僅克服了空間局限性,也不需要精準的點膠高度定位,點膠精度、點膠速度、最小點膠直徑和點膠一致性等方面非常有優勢,未來也將會占有更多的市場份額。
參考文獻:
[1] 趙航宇.全自動在線點膠機的研制[D].哈爾濱:哈爾濱工業大學,2018.
[2] 劉鳳華.自動環氧粘片的常見問題與處理[J].電子工業專用設備,2020.
[3] 劉哲.現代電子裝聯工藝學[M].北京:電子工業出版社,2016.
(本文來源于《電子產品世界》雜志2021年8月期)



評論