光纖陀螺儀第三閉環回路控制研究
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
作者簡介:王雅(1995—),女,陜西渭南人,碩士。研究方向:主要從事光纖陀螺儀電路與系統的研究。
本文引用地址:http://www.104case.com/article/202108/427636.htm0 引言
光纖陀螺儀是當前導航與制導領域廣泛使用的慣性器件,具有尺寸小、牢固穩定、啟動時間短等特點[1]。為擴大動態測量范圍、提高測試性能,信號解調過程中通常構建數字階梯波反饋相移以及階梯波復位控制雙重閉環回路,保證全溫條件下的控制精度。目前光纖陀螺儀普遍采用超輻射發光二極管(Super-luminescent Diode,SLD)作為光源,SLD 性能的不穩定會對光 纖陀螺儀的精度產生極大影響。隨著使用時間的增長,SLD 光源輸出光功率會逐漸降低;且光源的輸出光功率以及光波長易受溫度變化影響,復雜的環境因素會對陀螺儀性能造成較大的干擾[2]。
為減小光源不穩定造成的誤差影響,對SLD 光源的驅動控制進行研究。光源驅動控制多采用恒流驅動與溫度控制相結合的方式來間接穩定光功率,這種方法并不能保證光源工作的穩定性與可靠性[3]。因此,本文提出光源光功率控制技術,在陀螺儀內部增加第三閉環回路反饋,以此提高SLD 光源的控制精度,滿足系統要求。
1 系統結構及原理
1.1 光源的作用與選擇
光源的主要作用是為光纖陀螺儀提供產生Sagnac效應所需的合適光信號,因此要求使用的光源可靠性高、體積小、壽命長,同時還具備短相干長度、窄的光束發散角及較高的輸出功率。SLD 光源是自發輻射的單路光放大器件,發射部分偏振光,光波輸出波長穩定、偏振度適宜,這些優點使其成為當前光纖陀螺儀使用的理想光源[4]。
1.2 SLD光源對光纖陀螺儀性能的影響
SLD 光源作為光纖陀螺儀光路結構中唯一的有源功率元件,探測器探測到的光功率取決于光源的輸出功率和整個光學系統的總損耗。散粒噪聲引起的隨機游走與返回探測器的光功率的平方根成反比,為提高光纖陀螺儀的性能,必須提高光源的輸出光功率。
干涉型光纖陀螺儀檢測器的輸出為:

式中:I 為檢測光強;K0 為比例系數;I0 為初始光強;φS為Sagnac 相移。目前,對干涉式光纖陀螺儀的研究普遍采用方波偏置方案,對正、負半周期信號相減并化簡之后可得出:

式中:L 為光纖總長度;D 為光纖環直徑; λ 為光在真空中的波長;c 為光在真空中的速度;Ω 為陀螺轉動角速率。由式(2) 可知:光源輸出功率I0 的不穩定將影響光纖陀螺儀的測量精度,而平均波長λ 的波動也將導致光纖環的非互易相移產生漂移,即影響光纖陀螺儀標度因數的穩定性。
目前,對SLD 光源的驅動普遍采用恒流源,光源輸出光信號的功率由光源驅動電路獨立控制,該電路在全溫條件下或長時間工作周期內始終保持恒定的驅動電流輸出。隨著SLD 光源使用時間的增長,SLD 光源在恒定的電流驅動下輸出的光功率會逐漸降低;不同溫度條件下,注入相同的驅動電流,輸出光功率也會發生波動,這些因素將直接影響光纖陀螺儀的整機性能和指標參數。
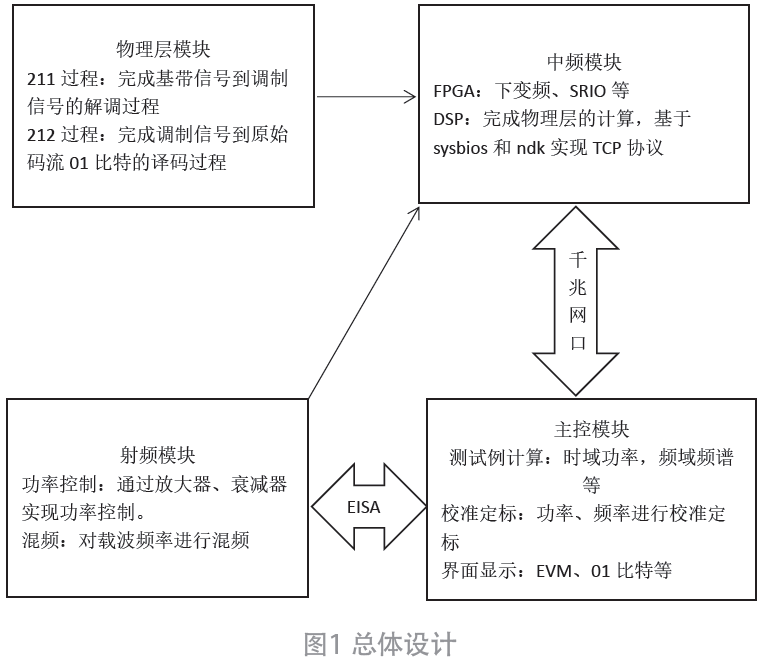
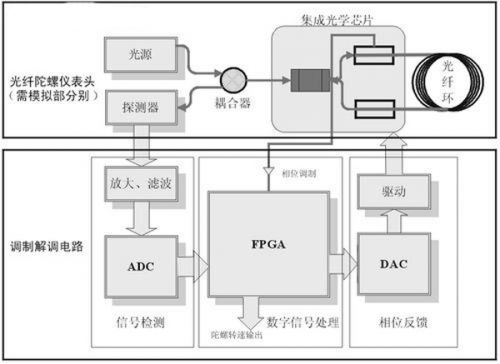
光功率控制技術是以光源輸出光功率為對象,實現直接控制。基本思想是通過數字解調電路對PIN-FET 檢測到的光信號進行解調,根據光功率的波動變化,提高或降低光源的驅動電流,摒除其他環境因素造成的干擾,實現光纖陀螺儀光路內傳輸光信號的閉環穩定,系統結構圖如圖1 所示[5]。

2 系統硬件設計
要實現對光源輸出信號的動態控制,光源驅動電路必須采用數字電流源電路,該電流源的輸出電流由數字解調電路控制。動態調節第一步是實現對陀螺光路輸出的實時監測,光纖陀螺儀的組成結構中,PIN-FET 組件是實現將陀螺光路中的光信號轉換為電信號的功能模塊,通過對PIN-FET 輸出的電信號進行采樣、解調等處理之后可以實現對光功率的實時監測。光纖陀螺儀在閉環控制下的PIN-FET 輸出信號為典型的梳妝波信號,對該信號進行模擬/ 數字轉換,將信號當中的直流信號(即平坦區間信號)進行采樣和解調,通過相應的濾波算法即可得到輸入PIN-FET 的光信號功率,據此得到光纖陀螺儀整個光路的實時光功率波動情況。通過數字電流源對光源驅動電流進行實時調節,實現陀螺整個光路的光功率穩定。
2.1 數字電流源電路設計
數字電流源電路可采用的技術方案主要有基于數字D/A 的模擬電流源電路、基于模擬輸入的集成電流源電路和集成數字D/A 的數字電流源電路方案三種,對三種技術方案的整體性能、技術水平、結構適應性、電路復雜度等各方面綜合考慮,選取集成數字D/A 的數字恒流源電路作為數字電流源電路的設計方案,原理框圖如圖2 所示。

電路主要由基準電壓芯片和數字電流源芯片組成。基準電壓芯片提供基準電壓,該電壓值與電路的輸出電流的范圍有關。數字恒流源芯片內部集成了D/A 轉換模塊,通過控制邏輯接口(例如三線串行接口)實現輸出電流的外部控制,其滿量程輸出電流可以調節。其輸出電流的表達式為:

式中: Code 為控制器輸入的數字量;N 為其內部集成的D/A 轉換模塊的位數;VREF 為基準電壓,K 為放大倍數。
該方案的優勢是可以實現集成化和全數字化。電路核心為數字電流源芯片,輔助電路為電壓基準電路,電路的集成度較高,且電路的外圍配置簡單明確,實現容易,為最優數字恒流電路的技術方案。
2.2 電路板設計
光源數字電流源電路采用基于集成數字D/A 的數字電流源電路方案,核心器件為ADI 公司的ADN8810 數字電流源。ADN8810 是一個可調節的最大輸出電流高達300 mA 的12 位高精度電流源,通過兩個外部檢測電阻來設置最大輸出電流值。
ADN8810 的輸出電流由下式決定:

式中:IOUT 為輸出電流;Code 為數字量;VREF 為基準電壓; RS 為采樣電阻。
數字電流源電路原理如圖3 所示。

ADN8810 具有三個輸入信號引腳SDI、SCLK、CS與外部進行連接,圖4 顯示了這三個信號的時序圖,其中地址A3 必須是低電平。

圖4 信號時序圖
3 系統軟件設計
光源光控算法通過數字解調電路中的FPGA 實現,主要對PIN-FET 的輸出光信號的光功率實施閉環控制,軟件算法流程如圖5 所示。

光功率閉環控制軟件基于Altera 公司(編者注:Altera于2015 年被Intel 收購)的FPGA 器件EP2C20F256I8,采用Verilog 語音設計實現。系統具體軟件設計主要是針對光功率控制算法及其A/D 程序編寫:FPGA 在SLD光源驅動系統上電工作后首先完成對各模塊的初始化,然后驅動模數轉換A/D 模塊采集光電探測器的輸出電壓值并轉化為數字信號,經處理后與基準設置值進行對比。根據偏差值計算是否達到目標后,進行算法處理,其結果重新賦值更新。程序主要由控制模塊(control)和驅動模塊(driver)組成。控制模塊主要實現PIN-FET 輸入光功率的閉環控制算法;驅動模塊主要實現將目標數字量通過SPI 接口傳輸到數字恒流電路,實現驅動電流的數字化驅動[6]。
4 實驗結果與分析
4.1 光功率穩定時間與穩定性測試
實驗目的:測試陀螺在全溫條件下(-45~+70 ℃)的光功率穩定時間和穩定性采用光功率控制和恒流控制的光纖陀螺儀在全溫范圍啟動時的光功率穩定時間如表1 所示,采用光功率控制技術時光功率穩定性如表2 所示。

4.2 陀螺穩定性測試
試驗目的:測試陀螺在全溫范圍內(-45~+60 ℃)的偏值穩定性。采用光功率控制和恒流控制的光纖陀螺儀的偏值和穩定性如表3 所示。

從上述數據可以看出,采用光功率控制技術的光纖陀螺儀的光功率在全溫范圍內的穩定時間在0.437 s 左右,而采用恒流控制的光纖陀螺儀的光功率的穩定時間最大需要13.6 s。由此可以看出,光功率控制可以極大地縮短光纖陀螺儀的光功率穩定時間,從而加快陀螺儀的快速啟動;在陀螺性能指標上,整體上采用光功率控制的陀螺性能要優于采用恒流控制的陀螺性能。
5 結語
傳統的恒流驅動加溫度控制方案僅考慮影響光功率的兩大因素:電流、溫度 ,而光功率控制則實現了對動態光功率的直接穩定控制,包括對未知影響因素的補償,提高了控制精度;此外,在陀螺上電后快速地穩定了光功率,減少陀螺系統的啟動時間。光功率控制的另一個特點就是數字化,可以通過SPI 數字接口動態調節恒流電路的輸出驅動電流,既方便電流調試,又可以在使用過程中根據需要動態調整輸出電流,光功率控制技術的研究可有效提高光纖陀螺儀的工作壽命和技術水平,經過試驗驗證后已進行實際推廣。
參考文獻:
[1] 傅軍,常揚,寧治文.光纖陀螺小型化技術研究進展[J].傳感器與微系統,2020,39(07):1-4+7.
[2] 季陽.光源設計及其對光纖陀螺性能影響的研究[D].哈爾濱:哈爾濱工程大學,2017.
[3] 殷建玲,魯軍,陳玉丹,等.驅動電路一致性對光纖陀螺用SLD光源特性的影響[J].中國慣性技術學報,2017,25(04):518-522.
[4] 高洋洋,周衛寧,雷莉莉,等.光纖陀螺用超輻射發光二極管啟動偏振特性及其影響研究[J].激光與光電子學進展,2015,52(11):217-222.
[5] 劉燕妮,王夢達.功率反饋式高穩定光源電路設計[J].現代電子技術,2016,39(02):122-125.
[6] 岳博.干涉式光纖陀螺數字閉環技術研究[D].哈爾濱:哈爾濱工程大學,2018.
(本文來源于《電子產品世界》雜志2021年2月期)


評論