一種內存交互式通信在牙科治療機中的應用
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
隨著人們生活水平的不斷提高, 口腔健康越來越受到人們的關注。多功能牙科治療機也順應時代要求向著數字化、智能化、多樣化的方向發展。牙科綜合治療機是一款綜合了氣、水、電3 種必需元素的牙科治療儀器。從電控結構上可分為:地箱控制、側箱控制、腳踏控制、器械盤控制、照明燈控制、顯示屏、左按鍵板、右按鍵板等模塊。多功能的實現離不開多模塊的配合。基于模塊化的結構特點,所以大部分牙科治療機都選用總線方式。
本文引用地址:http://www.104case.com/article/202108/427330.htm1 適用于牙科治療機的總線分析
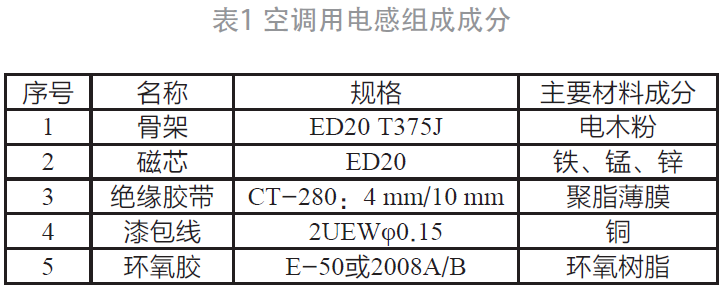
總線技術發展歷史悠久,技術成熟,已經在工業領域大量應用,比如汽車、計算機、PLC、自動化工廠等[1]。綜合牙科治療機本身的結構和應用特點,可選用常用幾種總線,如表1 所示。

對比3 種通信方式:CAN 總線通信速度快,抗干擾強,但是成本較高;IIC 總線通信速度稍快,成本低廉,但是抗干擾性差,在實際應用中,極易受到周圍電磁波干擾,引起誤動作;RS485 通信抗干擾性強,成本低廉,但隨著叢機增加,在一對多點通信時通信速度逐步降低(S/N),造成操作反應不靈活,延遲大[1]。
綜上所述,本文提出一種內存交互的通信方式,以解決RS485 總線隨著從機增加通信速度遞減的問題。從理論上分析,其通信速度不會因為從機的增加而遞減,解決了通信速度問題,再結合RS485 通信抗擾性強和價格低廉的特性,特別適用于牙科治療機及類似設備。

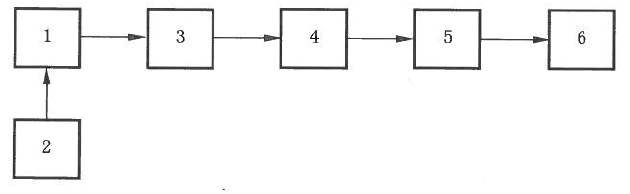
圖1 拓撲結構
2 內存交互的通信方式
2.1 交互式通信的拓撲結構圖
通信拓撲結構設計為環形結構,每個節點采用雙串口設計,一進一出。從圖1 拓撲結構可見,主機和模塊1、模塊1 和模塊2 等兩個模塊之間都獨占通信通道,有助于快速交互內存數據。其通信速度可以保持主機和模塊1 的速度,而不會因為增加模塊而變慢。
另外,選用環形結構可以增加通信的穩定性。因為在設備使用過程中,難免會出現模塊損壞和通信線損壞的情況。在非閉環結構情況下,如果某個模塊損壞或者該模塊通信線不正常,那么它后面的模塊都將通信失敗。環形結構可以結合程序做自適應分析,如果某個模塊通信失敗,就沒有返回成功的標志給下一個模塊和主機。那么,后面的模塊和主機則翻轉通信順序。主機通信口2 由以前的從機接收數據變成主機發送數據,逆向通信至通信失敗的模塊。這樣,主機可以因有兩個通信端口、兩條通信路徑而保證通信暢通。并且可通過顯示屏通知用戶哪個通信節點出現故障,在設備空閑時候進行設備檢修。
2.2 交互式通信的協議層
通信協議主要使用內存交互的概念,主機到從機1、從機1 到從機N 之間快速交互內存數據。由于數據的快速交互,主機就可以把從機的數據看作內部數據。從機I/O 點也可以被看作在主機內部。根據治療機的設備特性,可以規劃為10 個節點,每個節點8 個字節,需要讀取和輸出兩組數據,再加上通信控制狀態的16 個字節,共需要176 個字節。節點的個數和節點的字節數需要根據實際情況設定。具體的模塊內數字量輸入、輸出和模擬量的個數可以根據設計需要進行分配。數據協議如圖2,分為輸出數據和輸入數據兩個部分。
2.3 交互式通信的速率估算
通信速率可以按照主機和模塊1 的速率估算。通信串口設定為波特率為192 00 bit/s,1 個起始位,1 個停止位,8 個數據位[2]。那么,每秒最多傳輸的字節數為19 200/10=1 920 個。每次通信的字節數是88 個,每秒的通信次數為1 920/88=21.81。每次通信的時間是1 000/21.81=45 ms。考慮到通信之間的必要延遲時間30 ms,1 次完整通信時間是45+30=75 ms。那么,每秒可以完整通信13.33 次,因而可以實現0.075 s 的刷新率。如果波特率設定為57 600 bit/s,則可以實現0.045 s 的刷新率,內存刷新率不到0.1 s,因此完全可以滿足一般設備控制需要。
2.4 交互式通信的硬件層
硬件層實現方式可以是RS485、RS232 和TTL 串口,可以根據不同的設備特點,要求的通信距離和抗干擾強度不同選用。
2.4.1 帶保護的RS485電路設計
如圖3 所示,V7 整流橋和V6/V8 穩壓管組成高壓吸收網絡,吸收通信中的高壓干擾,保護通信電路。
2.4.2 帶保護的RS232電路設計
如圖4 所示,利用V2/V3 和V4/V5 雙路共陰極穩壓管進行ESD 保護。L3/L4/L6/L6 磁珠用來抑制信號線上的高頻噪聲和尖峰干擾。R55/R56/R57/R58 電阻用來限流,保護通信口免受大電流沖擊。
2.4.3 帶保護的TTL串口電路設計
如圖5 所示,利用D8/D9 雙路二極管將電壓限制在安全范圍。TX 發送端使用U9 雙路與門將電壓提升到5 V,并隔離CPU。D5 二極管也對RX 輸入進行隔離,以阻止高壓輸入,也可將電壓降到3.3 V,起到很好的隔離保護作用。

3 軟件設計
由于物理層實現都是采用通用成熟的通信方式,并且增加了保護電路,確保了通信硬件的穩定性。所以,軟件協議層的開發也必須要保證邏輯的嚴謹性,才能保障通信的順暢。有必要的容錯處理才能使通信擁有較強的抗干擾性。軟件分為主機和從模塊兩種。主機的主要功能是2 個串口通信,分別為主端口、從端口,數據流從主端口發送,經各個從模塊再回到從端口。根據從模塊的狀態,主機判定從模塊是否通信故障,詳情參見圖6。從模塊主要通信功能也是2 個串口通信,但是和主機有所不同,它從上一個模塊得到的數據,加上從模塊自身的數據,然后送給下一個模塊。經反復推敲的軟件流程如圖7 所示。

圖3 RS485電路設計

圖4 RS232電路設計

圖5 帶保護的TTL串口電路設計

4 結束語
內存交互通信方式綜合利用了RS485 通信抗干擾強、成本低廉的優點,解決了一對多點通信時通信速率遞減的問題。結合了多功能牙科治療機控制單元分散的特點,使得設計的控制系統穩定性高、成本低;也使產品在市場化競爭中擁有性能和價格的雙重優勢。該方案實現了眾多設備長期穩定的運行,使理論設計得到了實踐的驗證。

參考文獻:
[1] 樊昌信.通信原理[M].北京:國防工業出版社,2006.
[2] 劉軍.例說STM32[M].北京:北京航空航天大學出版社,2011.
(本文來源于《電子產品世界》雜志2021年5月期)


評論