機器視覺技術的發展趨勢

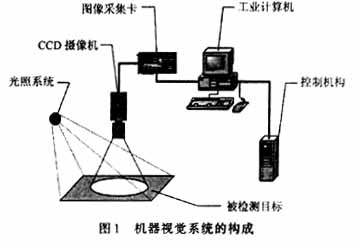
機器視覺是人工智能正在快速發展的一個分支,簡單說來,機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統是通過機器視覺產品(即圖像攝取裝置,分CMOS和CCD兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,得到被攝目標的形態信息,根據像素分布和亮度、顏色等信息,轉變成數字化信號;圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控制現場的設備動作。
本文引用地址:http://www.104case.com/article/201811/394696.htm機器視覺系統的特點是提高生產的柔性和自動化程度。在一些不適合于人工作業的危險工作環境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺。
機器視覺技術目前已經廣泛應用在機器人自主導航、機器人手眼一體伺服控制等領域中。但是在公安排爆機器人領域,機器視覺技術應用較少。多數排爆任務需要公安干警近距離進行勘察,而人的主觀判斷往往受制于經驗和生活中積累常識的影響,會出現不客觀的錯誤判斷。利用機器視覺系統采集的信息,能自主的分辨不同顏色、形狀、深度的排爆目標,同時將采集的圖像與常用爆炸物專家庫中的信息進行比對,客觀地反應目標是否為爆炸物并給出判斷結果。
機器人視覺技術的研究,最初源于1967年初美國斯坦福大學W.Wichman等人在一個機器人人工智能項目中,提出機器人以獲得的視覺光流作為視覺反饋控制的輸入信息,進行機器人的閉環位置控制。
他的思想被認為是機器人視覺技術的最初雛形,然而該研究項目在當時并未得到足夠的重視,主要原因是在當時視覺采集和圖像處理系統設備相當昂貴且并未成熟。直至1973年,當時為日本大阪大學教授的Y.Shirai在美國麻省理工學院人工智能實驗室作訪問學者期間,與實驗室其他學者共同建立了機器人視覺控制方法的實驗研究模型,并首次較成熟地提出了視覺控制方法的研究模型。但還是由于計算機圖像采集設備和圖像處理技術的限制,并未帶動機器人研究學者對視覺控制方法研究的熱潮。
進入90年代以后,特別是隨著計算機圖像采集設備、圖像處理技術和機器人控制技術的革新和發展,機器人視覺控制算法獲得了更深入的關注和研究。以B.Espiau等人于1992年提出的機器人視覺控制算法為起點,機器人視覺控制算法的研究又一次受到了極大的關注。
到目前為止,在工業機器人領域,機器人視覺技術已有了許多成功的應用例子,如裝配、焊接、搬運、郵件分檢,軌線跟蹤等。





評論