基于CORTEX-M3的多機通信網絡的設計與實現

摘要:系統以STM32F103作主控單元,使用RS485通信總線,制定了一套通信協議,從軟件角度保證了總線仲裁機制的完整,保證了測控網絡的正常運轉。在系統設計論述過程中,根據RS485通信總線的特點,論述了系統中多機通信設計的原理及過程,結合在系統調試過程中遇到的問題,提出了在使用RS485過程中的注意事項。
本文引用地址:http://www.104case.com/article/201809/388276.htm隨著嵌入式技術的發展,測控設備逐漸智能化。企業信息化需求在設備選型時一個必要條件就是設備要具有聯網通信接口。RS232接口能夠實現點對點的通信方式,但不能實現聯網功能,且遠距離傳輸性能抗干擾性差。RS485接口解決了此問題,其數據傳輸最高速率可達到10 Mbps,且接口采用平衡驅動器和差分接收器的組合,抗共模干擾能力強,抗噪性好,適合于遠距離傳輸。RS485總線最大可以支持32個節點,通過特制芯片,最大可以支持400個節點,因此,RS485非常適合于分布式測控系統通信領域。但RS485只能代表通信的物理介質,數據的傳輸訪問必須開發相應的程序。
CORTEX—M3是基于ARM7架構的處理器內核,采用哈佛架構,其功耗低,性價比高。在多機通信網的設計中,經過需求分析,提出并設計了一種基于CORTEX—M3的多機通信網絡。設計中,CORTEX—M3用做系統終端,作為主機和從機。從機負責前端系統的各類數據測量,主機作為控制端,負責各從機測量信息的采集,并通過網絡實現對從機的控制。在系統的設計中,網絡傳輸接口采用RS485,根據通信網絡特點,設計中自制了RS485多機通信協議,開發了基于CORTEX—M3處理器的通信接口程序,程序移植性好,可以移植到CORTEX—M3內核的通信網絡當中。經過測試,系統通信性能良好,無數據丟失及網絡死鎖現象。
1 RS485介紹
RS-485標準是為彌補RS-232通信距離短、遠距離通信的抗干擾性能差等缺點而產生的。RS-485標準只規定了平衡發送器和接收器的電特性,而沒有規定接插件、傳輸電纜和應用層通信協議。
RS-485標準與RS-232不一樣,數據信號采用差分傳輸方式,也稱作平衡傳輸,它使用一對雙絞線,將其中一線定義為A,另一線定義為B,如圖1所示。
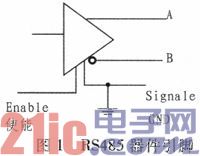
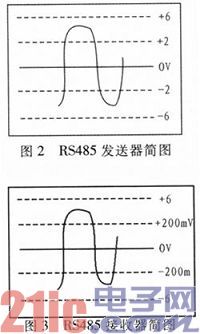
圖2中,RS485發送器中A、B之間的高電平是在+2~+6 V之間,表示正邏輯狀態;低電平是在-2~-6 V之間,表示負邏輯狀態。對于RS485接收端,當在A、B之間有大于+200 mV電壓,輸入為正邏輯電平;小于-200 mV,輸入為負邏輯電平,如圖3所示。圖1中RS-485器件中有一個信號地,一般,各器件信號地可以連接在一起,或者不連接;器件中,另有一個“使能”控制信號端,用于控制RS485是作為發送端還是作為接收端。當使能端為高電平時,作為發送端,當為低電平時,作為接收端。RS485為半雙工通信方式,同一時刻,器件只能作為發送端或接收端,軟件設計總線仲裁中,通過“使能”信號控制。
2 RS485在系統中的應用
RS485多機通信中,各器件中的A點連接在一起,B點連接在一起,通過雙絞線連接,所有RS485節點掛接在一對RS485總線上。由于RS485為半雙工工作模式,同一時刻,網絡中只允許一臺RS485接口設備處于發送狀態,否則,總線上的數據會混亂;此外,由于RS485缺乏硬件仲裁機制,通信中,無法通過硬件仲裁來釋放及占有總線,在多機通信網絡中,可以從軟件角度考慮總線仲裁。而RS485標準沒有規定應用層通信協議,在軟件設計系統總線仲裁中,可以根據系統特性及功能,制定相應的應用通信層協議。
1)系統簡述
系統中網絡結構采用星形網絡結構,網絡拓撲圖如圖4所示。
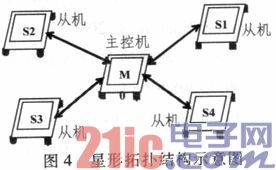
系統中的網絡結構由主控機(M0)、從機(S1、S2……)構成,均為嵌入式系統設備,內核為CORTEX—M3。本系統中所有的RS485終端設備為嵌入式設備,終端設備接口一致,直接通過雙絞線連接。
主機負責測控系統的信息采集。控制信息發送;各從機負責及完成各種信息的測量及數據轉換,并將測控信息發送給主機。系統采用星形拓撲結構,分支節點故障查找方便,由于接口簡單,擴展性良好,中心節點通信軟件協議較復雜,而各分支節點通信協議較簡單。
2)RS485通信協議總線設計
通信協議的設計主要包括物理層和數據鏈路層:
物理層實現以下功能:
發送數據時,將數據鏈路層送來的數據按字節進行并串轉換,增加起始位、奇偶校驗位及停止位,然后將轉換后的信號發送到物理信道上;接收數據時,從物理信道串行接收電平信號,然后進行電平轉換、奇偶校驗、串并轉換,得到所接收的數據。
數據鏈路層實現以下功能:
數據鏈路層位于物理層和應用層之間,為應用層提供統一的接口函數,實現無差錯的雙向數據傳輸。數據鏈路層協議主要包括幀格式設計、傳輸速率設置、幀收發程序、字符串收發程序。
①串口驅動程序設計
STM32F103串口驅動程序的設計調用系統庫函數,省去了很多底層函數的編寫。幀格式設計、傳輸速率設置通過結構體InitType DefInit StruCture結構體賦并初始化完成;幀的發送及接收已有庫函數USART_ReceiveData(USART_TypeDef*USARTx)及USART_SendData(USART_Type Def*USARTx,uint16_tData),通過這兩個函數的應用,可以實現字符串的收和發程序,簡化驅動程序開發。
在串口驅動程序設計中,需要注意的是:在接收及發送幀數據時,使能端的電平設置,因此收發程序不能直接使用stm32f中的庫函數。據此,在串口驅動程序的設計中,重新編寫了接收及發送字節函數。發送字節函數示例:
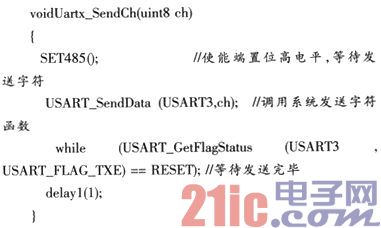
②通信協議設計
為了實現從機信息正確的接收,在設計過程中,根據系統特點,制定了相應的通信協議:人為認為每臺從機有地址編碼,例如,1號機地址為0x1,2號機地址為0x2,以此類推,此數據也代表了從機機號。從機全部作為接收端,等待接收命令。
第一步:所有從機處于接收等待狀態;主機發送一幀數據表示地址,從機接收并判斷是否為本機地址:是,則響應;否則,丟棄此幀數據,繼續等待接收本機地址幀;
第二步:從機接收到本機地址幀后,發送一個握手應答數據給主機。此時,從機作為發送端,主機作為接收端。主機發送完地址幀后隨即切換狀態并等待接收握手應答數據。當接收到總線握手數據后,主機判斷是不是所需要讀取的機號的握手通信數據:是,則通信成功,讀取從機發送信息;否則,重新開始地址發送;
第三步:從機發送總線握手信號后,隨即發送數據給主機。數據發送結束后,恢復等待接受狀態。
整個通信過程中,所有從機通信協議全部一致,從機接受地址信息并判斷后,如果和本機地址相符,則發送數據給主機。
按照系統中制定的通信協議,主機和從機的軟件設計流程圖如圖5一圖7所示。
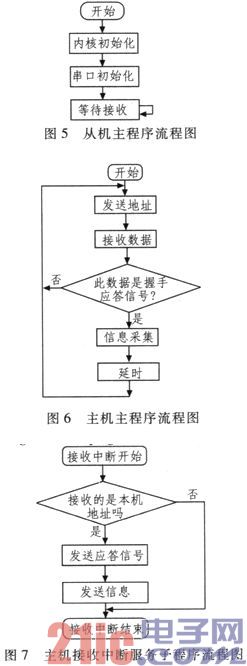
從機作為測控前端,實現系統測控和數據傳送,其通訊受控于主機,因而從機接收數據采用中斷方式,即從機一旦接收到主機的呼叫信號,立即進入接收中斷與主機通信,其工作流程圖如圖6、7所示。
在整個系統中,主從機均可作為發送端和接收端。同一時刻,網絡中只能有一個發送端,因此,在設計通信協議的時候,注意狀態的切換;另根據RS485狀態工作時序特點,需要設計好收發之間的延時,否則會出現數據丟失現象。發送時,使能端置“1”,延時1 ms左右,再發送有效數據,一幀數據發送完畢后再延時1 ms,使能端置“0”。這樣總線在狀態切換時,使之有一個穩定的工作狀態。
3 結束語
系統使用RS485半雙工收發器,實現了基于CORTEX—M3的多機通信網絡的組建,主機利用順序方式采集數據,實現了一主多從的通訊方式。主從機通過狀態的切換,都可以扮演發送端及接收端的角色,本質上還是使用了半雙工通信的特點,利用軟件進行任務調度,最終實現了星形網絡多機通信。本文設計的RS485通信協議可移植性強、穩定性高、易擴展,可以廣泛應用于工業控制、現場總線、遠程監控等領域。





評論