數字控制電容電流反饋逆變器的建模與閉環設計

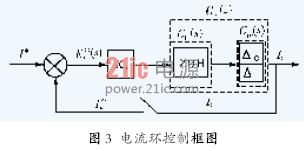
采用DSP控制后,系統是一離散系統,必須對Gpc進行Z變換。由此可得到內環電流環的離散傳遞函數為

根據朱利穩定判據[11],在忽略采樣時間的情況下,如果采樣周期為39 滋s(25.6 kHz),系統工作穩定的條件是
比例系數Kc=0.5 (5)
3 外部電壓環的設計
把電流環作為內環,采用PI 可以得到電壓外環的控制框圖如圖4所示。
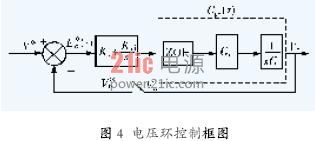
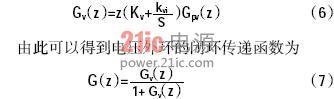
其中Gc為電流內環的傳遞函數。由框圖可以得到電壓環的開環傳遞函數為
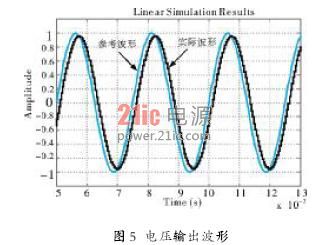
借助MATLAB,在輸入正弦信號的情況下對系統輸出的穩態誤差進行仿真。理想情況下,希望穩態誤差越小越好,但減小穩態誤差就要增大系統的開環增益,而開環增益過大會導致系統的不穩定甚至發生振蕩。通過仿真,我們得到的參數如下。
Kc=0.5
Kv=0.06 (8)
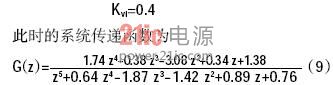
此時的幅值穩態誤差約為3豫,對應的輸出波形如圖5所示。
4 實驗驗證
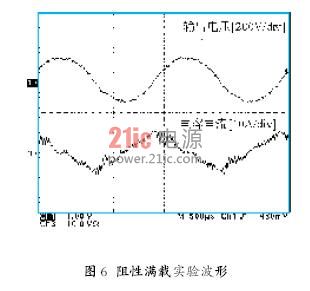
在理論分析的基礎上,我們設計了一臺400V·A的原理樣機對閉環參數進行實驗驗證,輸入直流電壓180V,輸出115V(有效值)/400Hz,開關頻率25.6kHz,采樣頻率同開關頻率,Lf越400 滋H,Cf=10 滋F,開關管采用
IXGH40N60C2D1,DSP采用TMS320f2812。圖6為滿載情況下的輸出電壓與電容電流波形。
5 結語
通過對逆變器的建模分析,選定了電容電流作為反饋量,提出了一種具有普遍應用前景的基于DSP全數字控制的閉環設計策略,電流內環根據穩定性來設計,電壓外環根據穩定性和穩態誤差來設計。最后進行了實驗驗證,實驗結果證明該逆變器系統動態響應快,帶非線性負載能力強,總諧波含量小,提出的閉環設計策略能夠滿足數字控制逆變器的控制要求,驗證了閉環設計策略的有效性和普遍性。







評論