基于新型控制策略的SRD性能優化問題

0 引言
本文引用地址:http://www.104case.com/article/201808/387692.htm開關磁阻電動機調速系統(Switched ReluctanceDrives,簡稱SRD)以其結構簡單、工作可靠、轉矩慣量比大、效率高和成本較低等優點脫穎而出,被認為是未來有很強競爭力的一種變速驅動系統。但是因為電動機采用的是雙凸極結構,高度飽和,故開關磁阻電動機調速系統本身是一個時變、非線性系統。磁阻轉矩是定子電流和轉子位置的非線性函數,傳統的線性控制方法難以滿足動態較快的開關磁阻電機(SRM)非線性、變參數要求,因此,與一般電機相比,開關磁阻電動機轉矩脈動比較明顯,由此引起電機噪聲及轉速波動,這限制了它的應用[1]。近年來,很多專家學者在開關磁阻電機調速系統的性能優化方面下了不少功夫。開關磁阻電機調速系統要做到最優化應該在參數最優化、結構最優化、功能最優化等三方面下功夫。SRD性能的改善不能一味地依靠優化SRM與功率變換器設計,還必須借助先進控制策略的手段。從20世紀80年代SRM 問世至今,在SRM控制方面已涌現出大量先進的控制思想,并取得了有益的成果。本文結合SRM 的控制模式,綜述比較SRM的各種新型控制方法,分析和介紹了各控制策略的優缺點,展望了SRM控制策略的發展新趨勢,并闡述運用新型控制策略對開關磁阻電機調速系統性能的改善。
1 開關磁阻電機調速系統的組成
開關磁阻電機調速系統主要是由四部分組成:開關磁阻電機、功率變換器、控制系統及檢測系統,如圖1所示。SRM是實現機電能量轉換的部件,也是此系統區別于其他電動機調速系統的主要標志。功率變換器負責提供能量,一般是由交流電經整流后得到的直流供電。控制器是此系統的核心,處理反饋信號,計算轉速,轉子位置,從而輸出相應控制信號來控制電機以實現需要的功能。檢測系統一般包括電流檢測和位置檢測,為控制系統提供必需的信號。
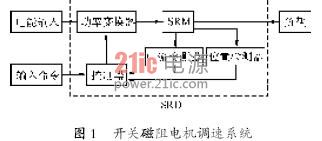
來控制電機以實現需要的功能。檢測系統一般包括電流檢測和位置檢測,為控制系統提供必需的信號。
2 SRM 的控制方法
由SRM的準線性模型分析得到式(1)所示的平均電磁轉矩(Tav)的解析。

當給定電動機,電機的結構參數是一定的。若要改變電機轉矩大小,只有改變SRM 的控制參數:定子繞組電壓Us 、開通角茲on與關斷角茲off。SRM 控制參數多,控制系統設計的主要問題是實現參數最優化,結構最優化和功能最優化。根據改變控制參數的不同方式,SRM 有三種控制模式,即電流斬波控制(Current Chopping Control,簡稱CCC)、角度位置控制(Angular Position Control,簡稱APC)與電壓控制(Voltage Control,簡稱VC)。其中,CCC一般應用于電機低速區,是為限制電流超過功率開關器件和電機允許的最大電流而采取的方法;APC 是電壓保持不變,通過改變開通角和關斷角調節電機轉矩大小,適于電機較高速區,但是對于每一個由轉速與轉矩確定的運行點,開通角與關斷角有多種組合,每一種組合對應不同的性能,具體操作較復雜,且很難得到滿意的性能;VC是在固定的開關角條件下,通過調節繞組電壓來控制電機轉速,它分直流側PWM 斬波調壓、相開關斬波調壓與無斬波調壓,而無斬波調壓是通過調節整流電壓以響應電機轉速要求,在整個速度范圍內只有一個運行模式,即單脈沖方式。
3 SRM 的幾種新型控制策略
早期的控制策略主要以線性模型為基礎,結合傳統PI 和PID 控制,例如采用前饋轉矩和電流控制、反饋轉速控制等。但是基于線性假設的SRM 控制系統難以獲得理想的輸出特性,魯棒性差,其動靜態性能無法與直流傳動相媲美,這嚴重阻礙了SRD的發展。SRM 是高速非線性系統,具有雙凸極集中繞組的幾何結構,為了輸出最大轉矩而常運行于飽和狀態,磁阻轉矩是繞組電流和轉子位置的非線性函數。傳統的線性控制方法難以滿足動態較快的SRM非線性、變參數要求。近幾年,為了改善系統的性能,國內外發表了一些基于現代控制理論和智能控制技術建立SRD動態模型和系統設計的文獻。
3.1 滑模變結構控制
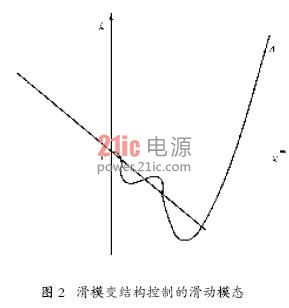
根據變結構控制理論,在滑模變結構控制中,系統的閉環傳遞函數的特征方程以極高的頻率切換,通過對系統實時目標誤差及其各階導數的檢測、運算、判斷,并以理想開關的方式切換控制量的大小和符號,使系統的結構發生變換,從而使系統的狀態在預先設計的一個特殊超平面的領域內向平衡點滑動,達到并穩定在平衡點,如圖2所示。
滑模變結構控制是對不定性非線性動力學系統進行控制的一種方法。系統中的控制器是由若干個參數或結構不同的子控制器組成的。該系統在工作過程中,預先為控制系統在狀態空間中設計一個特殊的超平面,利用不連續的控制規則,使系統在一定的條件下沿規定的狀態軌跡做小幅、高頻率的上下運動,迫使系統的狀態沿著這個規定的超平面向平衡點滑動,最后漸進穩定于平衡點或平衡點的某個允許的鄰域內,即滑動模態運動。滑模變結構控制對系統的參數變化和不確定性擾動有較強的魯棒性,并具有降階解耦、響應速度快、動態性能好和易于實現的優點。滑模變結構系統的滑動模態具有完全的自適應性,任一系統都有不確定的參數,要受到外部環境的各種干擾等,但通過構造滑模變結構控制的控制律可使得各種外界擾動對滑動模態不發生影響,實現完全自適應,提高SRD的性能。










評論