電動輪椅控制系統的設計與實現

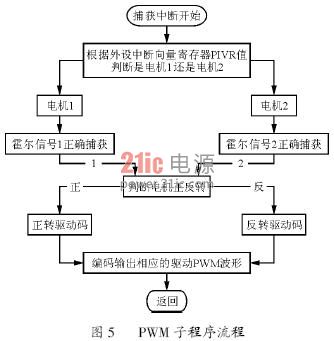
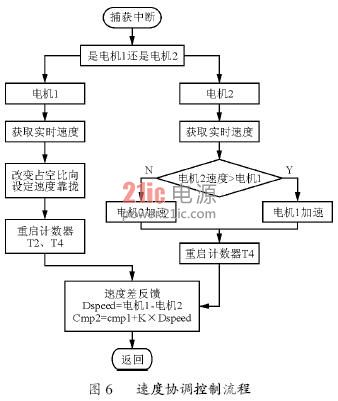
每次捕獲中斷發生時,分別對兩路BLDCM的速度相關參數進行調整。
5 試驗結果
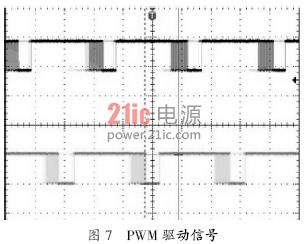
為驗證以TMS320LF2407A 為控制核心的系統的工作效果,對電路進行了實際的搭建和調試。
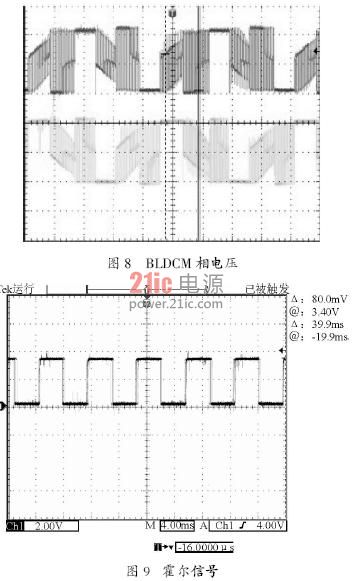
由圖7、8、9 可見,系統運行平穩可靠,對按鍵指令的反映時間可以滿足系統的控制要求。該系統已完成原理樣機系統聯機調試,兩路電機均可以平穩轉動,并且實現前進、后退、加速、減速、停止等基本功能,說明系統所采用的控制策略是恰當且成功的。并且圖8 示出,系統的兩路BLDCM同時工作時,其各路性能都達到了系統性能的要求。
6 結語
系統實際搭建后的試驗結果表明,系統采取的上述措施是合理且成功的,它能使系統達到預期的性能要求。













評論