電動輪椅控制系統的設計與實現

0 引言
本文引用地址:http://www.104case.com/article/201808/387308.htm目前的電動輪椅設計大體可分為兩種:一種是采用前被動輪加后輪驅動的方式,因為是前被動輪加后驅動輪的方式,所以回轉半徑窄的地方不能使用;另一種是根據希望前后左右都能夠自由移動的全方向移動方式,該方法是將驅動輪配在車體中央附近的區域,這樣可以適應一定窄的環境,但由于車輪和車體之間不能產生相對運動,所以無論在驅動輪的配置上如何下功夫都不能使回轉半徑為零[1]。
針對上述兩種輪椅控制方案的缺點,設計實現了一種全方向輪椅控制系統。它是以DSP作為控制核心的電動輪椅控制系統,采用單路電動輪PID控制,雙路電動輪速度差協調控制方案。給出了主電路結構,通過實際電路實現了設計方案,最后通過試驗結果證明了該設計方案的可行性。
1 系統總體設計
圖1 所示為電動輪椅控制系統的結構框圖。
主要采用單個DSP 帶兩路無刷直流電機,直接通過DSP 實現對兩路電機的控制,并且將兩路BLDCM當前的位置反饋信號發送給DSP,DSP 計算采樣所得的反饋信號和位置給定信號,并發出相應的PWM 波,控制三相逆變器,進而控制電機動作。
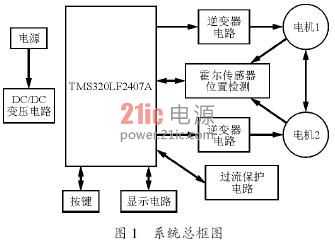
在系統中兩路BLDCM 對于DSP來說是一個集中的整體,DSP 獲取數據并反饋數據。在系統中,兩路BLDCM信息的處理有時是相互獨立的,所以具有相對獨立的軟件和硬件系統。另外,各通道的控制性能及效果幾乎一致,所以可以互換而不影響控制性能。
鍵盤和顯示部件都是直接與DSP相連,不存在傳輸過程中的信號干擾問題,同時對于系統所處的各階段都可以直接通過鍵盤控制,并且在顯示部件上直觀反映。
電機的霍爾傳感器將電機轉子位置以三路高低電平信號送入DSP 的捕獲單元(CAP),之后與換相表相比較,以控制三相逆變器功率管的開通、關斷,使之與轉子的位置相匹配。
此外,系統將所采樣的相電壓信號作為功率保護信號經電平轉換后直接送入DSP的功率保護引腳,當出現低電平時,將觸發DSP的功率保護中斷,DSP將封鎖對應通路的PWM 波。
DSP發出的PWM 波經光耦隔離后送入功率驅動芯片,進行功率放大后送入三相逆變器功率管的柵、源極之間,以控制功率管的開關動作。
2 系統控制策略
本設計主要控制策略包括以下兩個方面。
2.1 單路電機控制策略
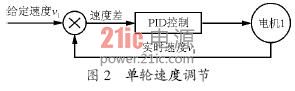
如圖2所示,單路電機采用PID 閉環控制對轉速進行調節。系統位置閉環性能直接決定了伺服系統的動、靜態性能,是系統控制的關鍵部分。
PID算法具有結構簡單,調試方便等特點。雖然在調節時改變量一定,但由于閉環產生的頻率很高,所以將改變量設定為一個較小量時,也能滿足系統的性能要求。在設定Ki,Kp,Kd 這3個參數范圍的基礎上,通過對實際電路參數進行微調,在基本滿足系統快速性的基礎上同時達到較好的超調量,從而提高系統穩定性。
2.2 雙路電機控制策略
如圖3所示,是設計含有兩路獨立驅動的電動輪的控制系統框圖。由于兩個電機是分別安裝在兩個驅動輪的軸上,所以當兩輪的驅動裝置內部參數及外界路況不等時,即使兩個電機的輸入一樣,也不能保證兩個驅動輪的速度相同,這里采用補償系統,來消除系統在運行過程中產生的兩電動輪之間的速度差。
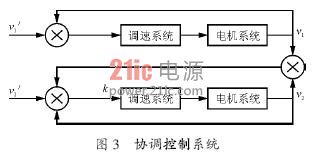
在直線運行中,采用速度差協調系統來調節兩個電動輪的轉速。設定一主動輪,讓從動輪速度跟隨主動輪,使兩個電動輪速度盡量一致。在轉彎時,內外側的電機同時減速,內側電機的減幅遠大于外側電機的減速幅度。兩電機分別采用自己的參考速度,進行獨立的PID運算,從而保證在路面狀況不是很好的情況下實現輪椅的轉彎[2]。
3 系統硬件設計
根據電動輪椅功能需求,該設計主要由一片DSP和兩路BLDCM驅動電路,以及必要的電平轉化電路組成。DSP負責整個系統的設計和控制,所有的信號的采集和處理都由DSP完成,并且還產生所需的PWM 信號與故障保護中斷請求。結合實際情況,設計中采用TMS320LF2407A 作為控制核心。它包括兩個獨立的事件管理器:每一個都包含兩個16位通用定時器,8個16位脈寬調制(PWM)輸出通道,三個捕捉單元,DSP主頻為 40MHz[3]。
如圖4 所示,驅動電路主要通過驅動芯片IR2130作為核心驅動。逆變器主體由6 個功率開關器件組成三相全控橋電路,通過這6 個開關的關斷和導通完成BLDCM的驅動,實現對電機轉速和轉向的控制。為防止自舉電容兩端電壓放電,二極管應選擇高頻恢復二極管HER107。另一方面為防止自舉電容放電造成其兩端電壓低于欠壓保護動作的門檻電壓值,電容的取值應充分的大,本設計選擇47 滋F電容,耐壓25 V[4]。
4 系統軟件設計
圖5所示為產生逆變器驅動信號PWM 波的中斷子程序流程圖。圖6所示為兩路BLDCM 速度協調控制中斷子程序流程圖。兩路BLDCM 分別選用T2和T4 作為時基,從而準確捕獲兩次中斷的時間間隔,兩個時鐘都選用連續增計數模式。














評論