電機驅動電路設計

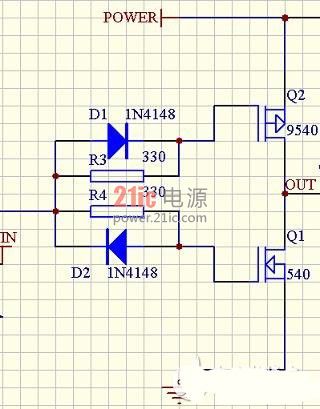
左圖就是一個12V驅動橋的一邊,上面電路的三極管部分被兩個二極管和兩個電阻代替。(注意,跟上圖邏輯是反的)由于場效應管柵極電容的存在,通過 R3,R4向柵極電容充電使場效應管延緩導通;而通過二極管直接將柵極電容放電使場效應管立即截止,從而避免了共態導通。
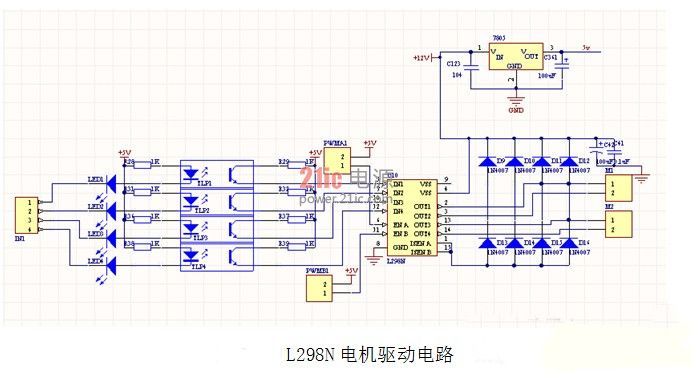
四、L298N電機驅動電路
1、工作原理分析:
在步進電機驅動模塊中,采用了帶光耦隔離,抗干擾能力強的TLP521作為隔離電流保護芯片,其中L297的17腳通過給高低電平來控制步進電機的正反轉,而18腳為步進時鐘輸入端,控制每個步數的時間增量,19腳步進電機的半步或者整步的選擇,10腳為使能控制端,來控制電機的啟停,而經過內部包含 4 信道邏輯驅動電路、高壓、大電流雙 H 橋式驅動器L298來控制電機的正反轉;利用L298實現電機驅動及其正反轉,并采用二極管進行續流保護,利用7805提供5v電源給控制器和l298芯片供電,這個電路在工作時間長的情況下容易發熱,造成電路不穩定性缺點。
主要功能特點是:
關鍵芯片:L298N 雙H 橋直流/步進電機驅動芯片
L298N 芯片工作電壓:DC 4.5~5.5V。
電機驅動電源電壓DC 5--35V。
電源輸入正常時有LED 燈指示。
PCB尺寸:4.4*5.0cm
最大輸出電流2A(瞬間峰值電流3A),最大輸出功率25W。
輸出正常時電機運轉有LED 燈指示。
具有二極管續流保護。
可單獨控制2臺直流電機或1臺兩相4 線(或6 線)步進電機。
可以采用并聯接法控制一臺高達3A 的直流電機。
可實現電機正反轉。
2. 模擬電路PWM的實現
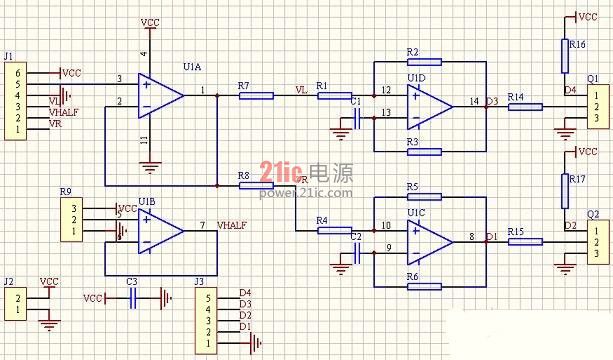
上圖為一個使用游戲手柄或者航模搖桿上的線性電位器(或線性霍爾元件)控制兩個底盤驅動電機的PWM生成電路。J1是手柄的插座,123和456分別是 x,y兩個方向的電位器。U1B提供半電源電壓,U1A是電壓跟隨。x,y分量經過合成成為控制左右輪兩個電機轉速的電壓信號。在使用中,讓L= (x+1)y/(x+1.4),R=(x-1)y/(x-0.6),經過試驗有不錯的效果(數字只是單位,不是電壓值)。經過U1C和U1D組成的施密特振蕩器把電壓轉換為相應的PWM信號,用來控制功率驅動電路。以U1D為例,R1,R2組成有回差的施密特電路,上下門限受輸入電壓影響,C1和R3組成延時回路,如此形成振蕩的脈寬受輸入電壓控制。Q1,Q2是三極管,組成反相器,提供差分的控制信號。具體振蕩過程參見對555振蕩器的分析。
編輯點評:本文主要介紹了電機驅動電路的設計,該方案實現的電路,可以采用獨立的單片機或CPLD加場效應管驅動電路以及電流采樣反饋電路。










評論