肢體康復(fù)系統(tǒng)中多伺服電機(jī)控制單元的設(shè)計

摘要:針對目前各類疾病所引起的肢體功能障礙逐年增加而醫(yī)護(hù)人力資源緊缺的情況,本文主要設(shè)計了應(yīng)用于外部肢體康復(fù)設(shè)備中的多伺服電機(jī)控制系統(tǒng)的硬件組成與軟件程序。該系統(tǒng)主要包含電源模塊,單片機(jī)模塊,液晶顯示模塊,按鍵模塊和伺服電機(jī)單元。通過單片機(jī)內(nèi)部程序的設(shè)定和外部液晶、按鍵等人機(jī)互動模塊的輸入,多伺服電機(jī)系統(tǒng)能依據(jù)指令控制機(jī)械手臂運動,完成指定動作。康復(fù)訓(xùn)練治療病人通過外部機(jī)械手臂的帶動,完成自身力量不能完成的訓(xùn)練動作,從而達(dá)到康復(fù)訓(xùn)練治療的目的。經(jīng)過實際檢驗,該系統(tǒng)能較好的完成既定目標(biāo)與要求。
本文引用地址:http://www.104case.com/article/201808/386734.htm隨著我國社會經(jīng)濟(jì)的不斷發(fā)展,人民生活水平不斷提高,人均平均壽命也大大增長。與此同時,各類疾病所引起的肢體功能障礙也成為中老年群體亟待解決的問題。
應(yīng)用于肢體康復(fù)設(shè)備的多伺服電機(jī)控制系統(tǒng)是針對肢體功能障礙患者設(shè)計的一款電動康復(fù)鍛煉裝置。該裝置主要由外部機(jī)械骨骼,多伺服電機(jī)控制單元,電源模塊,主控制單元,人機(jī)互動模塊組成。其中單片機(jī)主控制單元采用Kinetis K60控制多伺服電機(jī)系統(tǒng),進(jìn)而多伺服電機(jī)系統(tǒng)驅(qū)動機(jī)械手臂,幫助佩戴機(jī)械手臂的康復(fù)訓(xùn)練者做出預(yù)定的康復(fù)訓(xùn)練動作。此外,其本身可記憶多種模式以及不同的康復(fù)訓(xùn)練動作,以此簡化醫(yī)務(wù)人員的相關(guān)工作,提高醫(yī)療效率。康復(fù)訓(xùn)練者在該裝置的幫助下做被動康復(fù)訓(xùn)練,能大大降低康復(fù)訓(xùn)練的難度,減少不必要的人力成本。
1 多伺服電機(jī)控制系統(tǒng)硬件設(shè)計方案與分析
1.1 硬件總體設(shè)計方案與分析
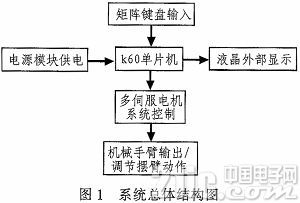
應(yīng)用于肢體康復(fù)設(shè)備的多伺服電機(jī)控制系統(tǒng)主要由以下幾個模塊組成:電源模塊、矩陣鍵盤模塊、液晶顯示模塊、主控芯片模塊、伺服電機(jī)單元以及外部的機(jī)械手臂支架。其中,電源模塊負(fù)責(zé)為其余各個模塊提供穩(wěn)定的工作電壓;矩陣鍵盤模塊負(fù)責(zé)外接控制指令的輸入;液晶顯示模塊負(fù)責(zé)系統(tǒng)運行狀態(tài)的顯示;主控芯片是整個系統(tǒng)的大腦,負(fù)責(zé)按照程序指令對各個模塊進(jìn)行控制;伺服電機(jī)單元受控于單片機(jī),其輸出量直接帶動機(jī)械手臂的運動,使機(jī)械手臂完成指定擺臂動作。
系統(tǒng)的總體組成框圖如圖1。
1.2 單片機(jī)主控模塊
Kinetis K60是飛思卡爾公司推出的inetis單片機(jī)系列中一款基于ARMv7的體系結(jié)構(gòu)ARM Cortex—M4內(nèi)核的32位單片機(jī)。片內(nèi)資源豐富,包含了GPID模塊,EXIT外部中斷模塊,PIT定時器模塊,ADC模塊,DAC模塊,F(xiàn)TMPWM模塊,輸入捕捉模塊,DMA模塊,UART模塊以及I2C模塊。其中GPIO分為A、B、C、D、E 5個端口,每個端口包含了32位IO口資源。所有的普通IO口都可以設(shè)置外部中斷,K60包含了4個定時器中斷,兩個獨立的12位DAC模塊,兩個獨立的16位ADC模塊。FTM PWM模塊共有一個8路PWM和兩個2路PWM。
1.3 電源模塊
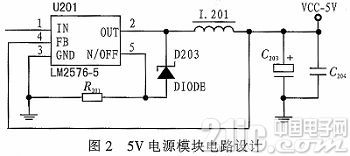
采用美國國家半導(dǎo)體公司生產(chǎn)的集成穩(wěn)壓電路LM2576,它內(nèi)部含固定頻率振蕩器(52 kHz)和基準(zhǔn)穩(wěn)壓器(1,23 V),并具有完善的保護(hù)電路,包括電流限制及熱關(guān)斷電路等,利用該器件只需極少的外圍器件便可構(gòu)成高效穩(wěn)壓電路。LM2576是開關(guān)電源,高壓差下效率高,發(fā)熱不嚴(yán)重,輸出電流大,可達(dá)3 A,但是紋波大,干擾大,電流稍微復(fù)雜,需要用到電感,7805是串聯(lián)穩(wěn)壓電源,效率差,輸入輸出壓差和電流越大,損耗越大,而且,輸出電流較小,一般在500mA左右,也有1.5 A的型號,但是紋波小,電路簡單,較常用。鑒于我們采用7.2 V電池供電,所以采用輸出散熱較好的LM2576穩(wěn)壓芯片。
系統(tǒng)的正常工作要有穩(wěn)定可靠的電源保障。系統(tǒng)中需要的電壓值主要有:7 V,6 V,5 V 3種。7 V電壓主要為電池接入口處,7 V電壓經(jīng)過兩片LM2576芯片分別產(chǎn)生兩個5 V、6 V兩個不同的電壓值。5 V電壓主要用于K60單片機(jī)供電,液晶顯示模塊供電,以及為矩陣鍵盤提供參考電壓。6 V電壓主要用于為多伺服電機(jī)控制系統(tǒng)中的舵機(jī)供電。
最終電源電路設(shè)計如圖2所示。
1.4 伺服電機(jī)模塊
選用的舵機(jī)工作電壓6 V左右。電源電壓在7.8~7.2 V之間,因此需要穩(wěn)壓片降壓。開始選用穩(wěn)壓片LM2576將電壓穩(wěn)定在6 V,靜態(tài)測試穩(wěn)定效果很好。在實際調(diào)試過程中發(fā)現(xiàn),在電源開啟瞬間芯片穩(wěn)壓值會有突變,對于芯片工作以及舵機(jī)轉(zhuǎn)角造成影響,使得整體控制效果下降。測試其他幾個類型芯片均存在此類問題,最后,決定用二極管降壓。由于二極管不存在電流干擾等問題,而且性能較穩(wěn)定,完全能夠滿足實際要求。
舵機(jī)的控制只需要一路PWM波即可滿足要求。PWM波周期10 ms,不同占空比使舵機(jī)轉(zhuǎn)過角度不同。
2 多伺服電機(jī)控制系統(tǒng)軟件設(shè)計方案與分析
2.1 系統(tǒng)軟件總體設(shè)計方案與分析
軟件運行需要配置單片機(jī)各個模塊寄存器數(shù)值,使單片機(jī)各個模塊正常工作。初始化中包括:單片機(jī)時鐘配置、I/O口配置、PWM模塊配置、RTI實時中斷配置、脈沖捕捉模塊配置。當(dāng)初始化完畢后,開始檢測外部按鍵的輸入,通過判斷不同的按鍵輸入,來決定單片機(jī)執(zhí)行擺臂動作或是舵機(jī)擺角值的加減調(diào)整。通過改變 PWM模塊內(nèi)部寄存器數(shù)值可以得到不同占空比的方波信號,實現(xiàn)對舵機(jī)的調(diào)節(jié)。
系統(tǒng)的軟件設(shè)計流程圖如圖3所示。
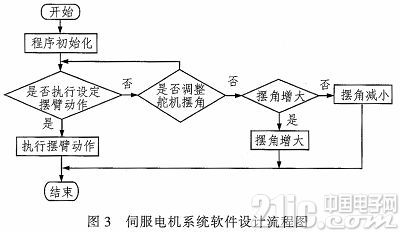
本設(shè)計分別為矩陣鍵盤按鍵定義五種不同的功能。當(dāng)按下一號鍵時,單片機(jī)執(zhí)行內(nèi)部固有的舵機(jī)輸出值,多伺服電機(jī)控制系統(tǒng)完成固定擺角,帶動機(jī)械手臂完成指定動作;當(dāng)按下二號鍵時,調(diào)整一號舵機(jī)值的擺角增大;當(dāng)按下三號鍵時,調(diào)整一號舵機(jī)值的擺角減小;當(dāng)按下四號鍵時,調(diào)整二號舵機(jī)值的擺角增大;當(dāng)按下五號鍵時,調(diào)整二號舵機(jī)值的擺角減小。主程序不斷掃描哪位按鍵被按下,依次判斷所需執(zhí)行的語句。
2.2 伺服電機(jī)模塊軟件設(shè)計與分析
伺服電機(jī)模塊的控制主要是通過單片機(jī)產(chǎn)生的PWM信號調(diào)制。在K60單片機(jī)中,脈寬調(diào)制模塊中有3個獨立的PWM模塊 FTM0,F(xiàn)TM1,F(xiàn)TM2。其中FTM0有8路獨立的可設(shè)置占空比的8位PWM通道,每個通道配有專門的計數(shù)器。該模塊有4個時鐘源,能分別控制8路信號。通過配置寄存器可設(shè)置PWM的使能與否、每個通道的工作脈沖極性、每個通道輸出的對齊方式、時鐘源以及使用方式(8個8位通道還是四個16位通道)。另外的FTM1,F(xiàn)TM2模塊各有兩個PWM通道。這3個模塊內(nèi)部的周期需保持一致,彼此間的周期可設(shè)置不同。
3 結(jié)束語
文中相關(guān)設(shè)計是基于伺服電機(jī)特性,利用肢體康復(fù)設(shè)備這個平臺得以體現(xiàn)該設(shè)計的實際作用,本設(shè)計可使肢體康復(fù)設(shè)備正確安全的做出相應(yīng)的動作,利用轉(zhuǎn)向伺服電機(jī)控制擺臂方向,使肢體康復(fù)設(shè)備達(dá)到應(yīng)有的性能要求。多伺服電機(jī)控制系統(tǒng)是應(yīng)用于肢體康復(fù)設(shè)備的主要環(huán)節(jié),本系統(tǒng)通過模擬醫(yī)護(hù)人員的肢體恢復(fù)輔助動作,能夠使機(jī)器手臂代替醫(yī)護(hù)人員的一部分工作,減少了醫(yī)護(hù)人員的壓力。在目前醫(yī)護(hù)人力資源緊缺的情況下,使用本系統(tǒng)對于患者進(jìn)行肢體康復(fù)訓(xùn)練無疑能節(jié)省大量的人力物力財力,同時擴(kuò)展了Kine ct技術(shù)的應(yīng)用,具備十分廣闊且實用的前景。












評論