基于51單片機(jī)的六足仿生機(jī)器人

一、整體框架:
(1)設(shè)計功能:
本文引用地址:http://www.104case.com/article/201808/385490.htm①能完成多方向行走以及其他的自定義的動作。(前進(jìn),后撤,左右轉(zhuǎn),避障);
②可自動避障;
③通過手機(jī)藍(lán)牙下令他的下一步動作。
(2)功能框架:
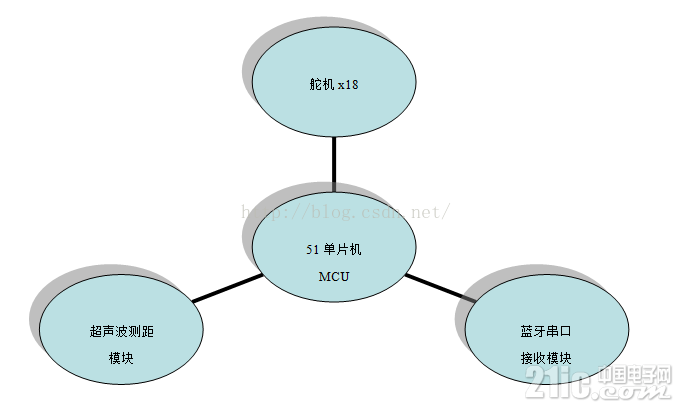
(3)使用器材:
①STC89C52單片機(jī)、74LS04(反相器);
②藍(lán)牙串口通信模塊;
③超聲波測距模塊;
④9G舵機(jī)18個;
⑤PVC線槽若干(模具);
⑥PCB轉(zhuǎn)印板;
⑦螺絲螺母若干。
⑦keil3軟件
二、工作原理:
(1)藍(lán)牙串口通訊模塊:
藍(lán)牙串口通訊模塊接收手機(jī)藍(lán)牙軟件發(fā)送字符串信號,單片機(jī)通過串口通訊協(xié)議處理藍(lán)牙模塊接收到的信息,再根據(jù)信息的內(nèi)容來判斷機(jī)器人將進(jìn)行的下一步行動。
(2)超聲波測距模塊:
超聲波模塊向某一方向發(fā)射超聲波,在發(fā)射時刻的同時開始計時(傳出低電平),超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時(回到高電平),根據(jù)低電平的長短來計算測量距離。(超聲波在空氣中的傳播速度為340m/s,根據(jù)計時器記錄的時間t,就可以計算出發(fā)射點(diǎn)距障礙物的距離(s),即:s=340t/2)
(3)舵機(jī)控制:
控制電路板接受來自信號線的控制信號,控制電機(jī)轉(zhuǎn)動,電機(jī)帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機(jī)的輸出軸和位置反饋電位計是相連的,舵盤轉(zhuǎn)動的同時,帶動位置反饋電位計,電位計將輸出一個電壓信號到控制電路板,進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)轉(zhuǎn)動的方向和速度,從而達(dá)到目標(biāo)停止。舵機(jī)的控制信號周期為20MS的脈寬調(diào)制(PWM)信號,其中脈沖寬度從0.5-2.5MS,相對應(yīng)的舵盤位置為0-180度,呈線性變化。也就是說,給他提供一定的脈寬,它的輸出軸就會保持一定對應(yīng)角度上,無論外界轉(zhuǎn)矩怎么改變,直到給它提供一個另外寬度的脈沖信號,它才會改變輸出角度到新的對應(yīng)位置上。
在我們的作品中,18路舵機(jī)分成2組,分別用一個內(nèi)部定時器來控制,產(chǎn)生對應(yīng)舵機(jī)的PWM信號(首先定時器1生成第一個舵機(jī)的脈寬,再生成第二個舵機(jī)的,到第9個舵機(jī)為止,然后定時器2以同樣方式生成剩余的9個舵機(jī)的PWM信號,以此往復(fù))。
三、制作過程:
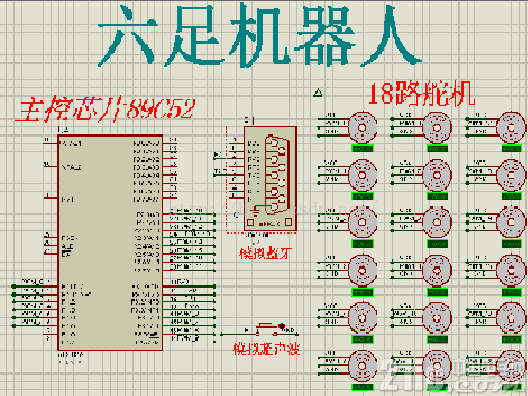
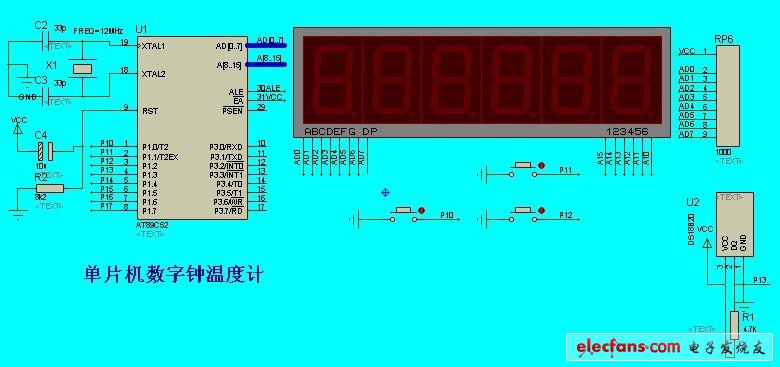
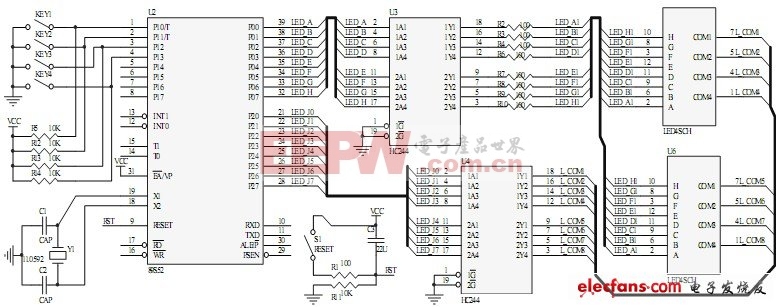
(1)仿真原理圖:
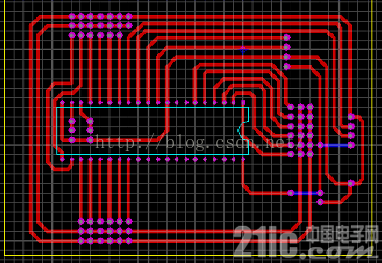
(2)PCB制作:
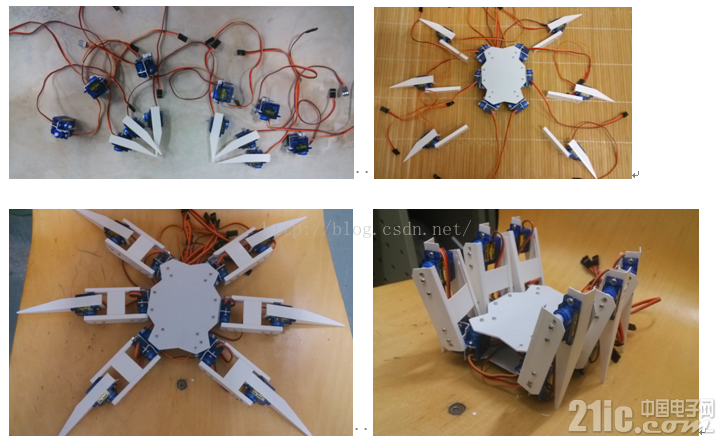
(3)硬件搭建:
《a》肢體制作:
材料:PVC線槽,PVC板
①模型制作:(純手工割出來的)

②舵機(jī)改造:

③整體:
四、調(diào)試以及問題解決:
①結(jié)構(gòu)問題:
我們認(rèn)為,整體的外形結(jié)構(gòu)是決定作品成敗的關(guān)鍵。經(jīng)過多種材料的試驗(yàn),最終我們選擇了容易裁剪、硬度基本滿足的PVC線槽來改裝拼接肢體,軀體使用更厚的塑料板。經(jīng)歷一周的純手工加工改造后,完成了整個模型的制作。
②供電問題:
由于我們使用的是9G舵機(jī),性能較差,扭力不夠,無法支撐起我們設(shè)計的電源與穩(wěn)壓模塊,最后放棄了內(nèi)嵌的電源,使用實(shí)驗(yàn)室的可調(diào)電源箱通過電線來供電,無法獨(dú)立開來也是我們的唯一遺憾。
③機(jī)器抖動問題
由于89C52只有6個內(nèi)部中斷,遠(yuǎn)遠(yuǎn)無法滿足18個舵機(jī)的控制,并且其他功能模塊也要使用到內(nèi)部中斷。所以我們將18路舵機(jī)分成了2組,初始時一個接一個舵機(jī)(每個舵機(jī)20ms周期)來發(fā)送PWM,但這也產(chǎn)生了發(fā)送一次18路PWM的總周期長度太大(18*20=360ms),足以產(chǎn)生被人眼所察覺的抖動。經(jīng)過反復(fù)研究,讓當(dāng)前舵機(jī)的PWM信號在上一個PWM信號的低電平處開始產(chǎn)生高電平(在上一個PWM的高電平結(jié)束后)如下圖,大大縮短了18路舵機(jī)一次動作的總周期長度(經(jīng)過18路后,總周期長度為一個PWM的周期長度約20ms),使抖動無法被人眼所觀察。
代碼挺多,給出主要的舵機(jī)控制代碼,代碼看不懂沒關(guān)系,后面有解釋:
#include《reg52.h》
#include《intrins.h》
#include《dongzuo.h》
#define ucharunsigned char
#define uintunsigned int
//PWM
sbit PWM0 = P1^0;
sbit PWM1 = P1^1;
sbit PWM2 = P1^2;
sbit PWM3 = P1^3;
sbit PWM4 = P1^4;
sbit PWM5 = P1^5;
sbit PWM6 = P3^4;
sbit PWM7 = P3^5;
sbit PWM8 = P3^6;
sbit PWM9 = P3^7;
sbit PWM10 = P2^0;
sbit PWM11 = P2^1;
sbit PWM12 = P2^2;
sbit PWM13 = P2^3;
sbit PWM14 = P2^4;
sbit PWM15 = P2^5;
sbit PWM16 = P2^6;
sbit PWM17 = P2^7;
//超聲波測距
sfr T2MOD = 0XC9; //定時器2模式控制寄存器地址
sbit Trig =P3^2;
sbit Echo =P3^3;
unsigned intdistance;
uchar DZCS =0x11; //控制動作
uchar buf;
uchar sd=3;
bit flag=0; //是否發(fā)送字符
bit CSB =0; //超聲波啟動控制位
bit HZ=0; //后退后左轉(zhuǎn)控制位
uchar PWMscan =0;
uchar PWMscan1 =0;
uchar PWMval[]={//初始姿態(tài)
0xf8,0x8f,0xf7,0x05,0xf9,0x8c,/*5*/ 0xfa,0x0d,0xf8,0x0b,0xf9,0x67,/*b*/ 0xfa,0xd4,0xf7,0x94,0xf9,0xcb,/*11*/
0xfa,0xad,0xfc,0xdd,0xfb,0x58,/*17*/ 0xfa,0xe9,0xfc,0xfc,0xfb,0x39,/*1d*/ 0xfc,0x18,0xfc,0xca,0xfb,0x00/*23*/
};
void delay(uint a)
{
uchar j;
for(a;a》0;a--)
for(j=0;j《112;j++)
;
}
void task00()
{
if(PWMscan==1) //第1路PWM。
{
PWM0=1;
TH0=PWMval[0];
TL0=PWMval[1];
}
else if(PWMscan==2) //第2路PWM。
{
PWM0=0;
PWM1=1;
TH0=PWMval[2];
TL0=PWMval[3];
}
else if(PWMscan==3) //第3路PWM。
{
PWM1=0;
PWM2=1;
TH0=PWMval[4];
TL0=PWMval[5];
}
else if(PWMscan==4) //第4路PWM。
{
PWM2=0;
PWM3=1;
TH0=PWMval[6];
TL0=PWMval[7];
}
else if(PWMscan==5) //第5路PWM。
{
PWM3=0;
PWM4=1;
TH0=PWMval[8];
TL0=PWMval[9];
}
else if(PWMscan==6) //第6路PWM。
{
PWM4=0;
PWM5=1;
TH0=PWMval[10];
TL0=PWMval[11];
}
else if(PWMscan==7) //第7路PWM。
{
PWM5=0;
PWM6=1;
TH0=PWMval[12];
TL0=PWMval[13];
}
else if(PWMscan==8) //第8路PWM。
{
PWM6=0;
PWM7=1;
TH0=PWMval[14];
TL0=PWMval[15];
}
else if(PWMscan==9) //第9路PWM。
{
PWM7=0;
PWM8=1;
TH0=PWMval[16];
TL0=PWMval[17];
}
else if(PWMscan==10) //給一定低電平,將周期拉長
{
PWM8=0;
TH0=0xFF;
TL0=0xd2;
PWMscan=0;
TR0 = 0; //關(guān)定時器0,開定時器1
TR1 = 1;
}
PWMscan++;
}
void task01()
{
if(PWMscan1==1) //第10路PWM。
{
PWM9=1;
TH1=PWMval[18];
TL1=PWMval[19];
}
else if(PWMscan1==2) //第11路PWM。
{
PWM9=0;
PWM10=1;
TH1=PWMval[20];
TL1=PWMval[21];
}
else if(PWMscan1==3) //第12路PWM。
{
PWM10=0;
PWM11=1;
TH1=PWMval[22];
TL1=PWMval[23];
}
else if(PWMscan1==4) //第13路PWM。
{
PWM11=0;
PWM12=1;
TH1=PWMval[24];
TL1=PWMval[25];
}
else if(PWMscan1==5) //第14路PWM。
{
PWM12=0;
PWM13=1;
TH1=PWMval[26];
TL1=PWMval[27];
}
else if(PWMscan1==6) //第15路PWM。
{
PWM13=0;
PWM14=1;
TH1=PWMval[28];
TL1=PWMval[29];
}
else if(PWMscan1==7) //第16路PWM。
{
PWM14=0;
PWM15=1;
TH1=PWMval[30];
TL1=PWMval[31];
}
else if(PWMscan1==8) //第17路PWM。
{
PWM15=0;
PWM16=1;
TH1=PWMval[32];
TL1=PWMval[33];
}
else if(PWMscan1==9) //第18路PWM。
{
PWM16=0;
PWM17=1;
TH1=PWMval[34];
TL1=PWMval[35];
}
else if(PWMscan1==10) //給一定低電平,將周期拉長
{
PWM17=0;
TH1=0xFf;//b1 //這是一個大概的值,由于每一組的PWMval的總和(PWMval中定時器的間隔的總和就是一個周期)不一致,
//所以會導(dǎo)致周期不一定是20ms,但大概可以控制在20ms左右,也是因?yàn)橹芷诘牟还潭ǎ圆判枰?/p>
TL1=0xd2;//e0 //調(diào)整每一個舵機(jī)的實(shí)際的占空比。
PWMscan1=0;
TR0 = 1;//開定時器0
TR1 = 0;//關(guān)定時器1
}
PWMscan1++;
}
void TImer0()interrupt 1
{
task00();//控制前9路PWM
}
void TImer1()interrupt 3
{
task01();//控制后9路PWM
}
在實(shí)際過程中,或許是由于舵機(jī)的質(zhì)量問題,又或者是其他問題,舵機(jī)的角度控制總是難以運(yùn)用原理上的公式來控制角度,都是實(shí)際操作,手動調(diào)整高電平的寬度,當(dāng)達(dá)到合適的值的時候,然后再把相應(yīng)的代碼記錄下來。
單片機(jī)的高電平寬度是通過定時器的兩個寄存器控制的,所以操作舵機(jī)的轉(zhuǎn)動就變成操作定時器的寄存器,再具體一點(diǎn)就是要得到TH、TL兩個值。(定時器高低位的差值對應(yīng)高電平的寬度)
在代碼上,在控制第幾路舵機(jī)的時候,TH、TL的值已經(jīng)定死了為哪一個PWMval[?],比如第18路:
TH1=PWMval[34];
TL1=PWMval[35];
這將決定此時第18路舵機(jī)的轉(zhuǎn)動角度是多少,那么怎么控制下一次該舵機(jī)的轉(zhuǎn)動角度呢?答案很簡單,就是把PWMval[34];PWMval[35];的值修改一下就可以了,其他的舵機(jī)同樣是這個道理。所以,機(jī)器人的一個姿態(tài)就可以變?yōu)檫@樣:機(jī)器人姿態(tài)→18路舵機(jī)的角度→18個TH、TL的值→一個36個元素的數(shù)組PWMval的值。
所以,一個動作姿態(tài)就可以用這樣一個函數(shù)來確定:
void DZ(ucharPWM[])//動作
{
uchar i;
for(i=0;i《36;i++)
PWMval[i]=PWM[i];
}
明白了這個之后,就是對每一個姿態(tài)收集數(shù)據(jù)了,在制作過程,我是把TH和TL的兩個值顯示在數(shù)碼管上,然后記錄下來的。
后面又加入了藍(lán)牙控制模塊,超聲波測距,發(fā)現(xiàn)51單片機(jī)的定時器不太夠用,改成了52系列的單片機(jī),還一個定時器即用藍(lán)牙模塊,又用超聲波測距,現(xiàn)在想來真佩服自己。給出控制代碼,大家自行研究:
//***************************中斷初始化**************************
void Init()
{
TMOD |= 0x11;//定時器0、1
ET0 = 1;//使能定時器0中斷
TR0 = 1;//開啟定時器0,定時器1中斷在定時器0開始后才打開
ET1 = 1;//使能定時器1中斷
IT1 = 0;//外部中斷1,低電平觸發(fā) (邊沿高變低)
EX1 = 1;//開外部中斷1
//定時器2用于波特率的產(chǎn)生
SCON=0x50;
PCON=0x00;
RCAP2H=0xFF;
RCAP2L=0xDC;//設(shè)置波特率為9600
T2CON=0x34;//將定時器2設(shè)置為波特率發(fā)生器(接收和發(fā)送都用TImer2) //此處包括啟動T2
ES=1; //串口中斷
EA = 1;//開總中斷
}
void TImer0()interrupt 1
{
task00();//控制前9路PWM
}
void timer1()interrupt 3
{
task01();//控制后9路PWM
}
void serial() interrupt 4
{
EA=0; //其余中斷全停
if(RI)
{
RI=0; //清除串行接受標(biāo)志位
flag=1;
buf=SBUF; //從串口緩沖區(qū)取得數(shù)據(jù) (i-0x30)將ASCLL碼轉(zhuǎn)換成數(shù)字
switch(buf)
{
case 0x00: DZCS=0x00;break; //向前走
case 0x01: DZCS=0x01;break; //向后走
case 0x02: DZCS=0x02;break; //左轉(zhuǎn)
case 0x03: DZCS=0x03;break; //右轉(zhuǎn)
case 0x04: DZCS=0x04;break; //橫著左
case 0x05: DZCS=0x05;break; //橫著右
case 0x06: DZCS=0x06;break; //揮爪子
case 0x07: sd++;break; //減速,其實(shí)就是每個姿態(tài)中的延時不一樣
case 0x08: sd--;break; //加速
case 0xff: CSB=!CSB;break; //啟動關(guān)閉超聲波壁障
default:
DZCS=0x11;break; //
}
}
EA = 1; //打開總中斷
}
void start()// 超聲波測距啟動函數(shù)
{
uchar i;
Trig=1;
for(i=0;i《20;i++)
{
_nop_();
}
Trig=0;
}
void count()// 超聲波測距函數(shù)
{
unsigned int time,timeH,timeL;
timeH=TH1;
timeL=TL1;
time=timeH*256+timeL;
distance=time*1.7/100;
}
void Inter()interrupt 2//外部中斷1在次完成測距以及相應(yīng)的后續(xù)操作
{
EA =0;
ET0=0; //關(guān)定時器中斷0
TH1=0;
TL1=0;
TR1 =1; //檢測到距離開啟定時器1
while(!Echo); //當(dāng)echo為零時等待,中斷flag跳出等待
TR1 =0; //關(guān)閉定時器1
count(); //計算距離
if(((10《distance)(distance《30))||HZ) //當(dāng)距離小于5cm時,變換動作哦(在中斷中變換平面感應(yīng)
{
DZCS=0x02; //向左
HZ=0;
}
if(distance《10) //當(dāng)距離小于10cm時,變換動作哦(在中斷中變換曲面感應(yīng)
{
DZCS=0x01; //后退
HZ=1; //后退后左轉(zhuǎn)標(biāo)志
}
if(distance》30) //當(dāng)距離小于40cm時,變換動作哦(在中斷中變換
{
DZCS=0x00; //向前
HZ=0;
}
TR1=1;
ET0=1;
EA = 1;
}
void main()
{
Init();
while(1)
{
uchar DZCST;//,i;
if(CSB)
start();
if(DZCST!=DZCS)//動作發(fā)生改變,則回到平衡
DZ(PH1);
if(sd==0)
sd=1;
switch(DZCS)
{
case0x00:DZXQ(sd);break;
case0x01:DZXH(sd);break;
case0x02:DZXZ(sd);break;
case0x03:DZXY(sd);break;
case0x04:DZHZZ(sd);break;
case0x05:DZHZY(sd);break;
case0x06:DZZZ(sd);break;
default:
DZ(PH1);
}
DZCST=DZCS;
}
}
『本文轉(zhuǎn)載自網(wǎng)絡(luò),版權(quán)歸原作者所有,如有侵權(quán)請聯(lián)系刪除』











評論