PIC16F877A DS1302芯片驅動

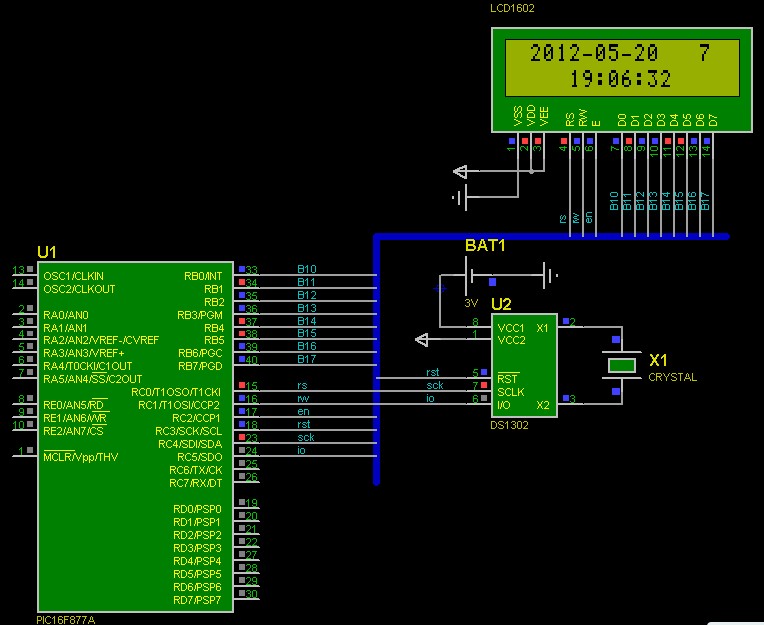
本文大體介紹了PIC16F877A DS1302芯片驅動
#include
typedef unsigned char uchar;
typedef unsigned int uint;
#define rs_h PORTC|=0x01
#define rs_l PORTC=0xfe
#define rw_h PORTC|=0x02
#define rw_l PORTC=0xfd
#define en_h PORTC|=0x04
#define en_l PORTC=0xfb
#define rst_h PORTC|=0x08
#define rst_l PORTC=0xf7
#define sck_h PORTC|=0x10
#define sck_l PORTC=0xef
#define io_h PORTC|=0x20
#define io_l PORTC=0xdf
#define SECADD 0X80//秒寄存器地址
#define MINADD 0x82
#define HRADD 0x84
#define DATEADD 0x86
#define MONTHADD 0x88
#define DAYADD 0x8a
#define YEARADD 0x8c
#define CONTROLADD 0x8e
#define PORT (PORTB)
void delayms(uint x);
void lcd_com(uchar com);
void lcd_dat(uchar dat);
void lcd_write(uchar c,uchar r,uchar dat);
void lcd_init(void);
void Ds1302Init(void);
void WriteByte(uchar dat);
uchar ReadByte(void);
uchar BCDtoDex(uchar dat);
uchar DextoBCD(uchar dat);
uchar ReadByte(void);
void Ds1302Write(uchar add,uchar dat);
uchar Ds1302Read(uchar add);
void main(void)
{
uchar sec,min,hr,date,month,day,year;
TRISB=0x00;
TRISC=0xc0;
lcd_init();
Ds1302Init();
while(1)
{
sec=Ds1302Read(SECADD);
min=Ds1302Read(MINADD);
hr=Ds1302Read(HRADD);
date=Ds1302Read(DATEADD);
month=Ds1302Read(MONTHADD);
day=Ds1302Read(DAYADD);
year=Ds1302Read(YEARADD);
sec=BCDtoDex(sec);
min=BCDtoDex(min);
hr=BCDtoDex(hr);
date=BCDtoDex(date);
month=BCDtoDex(month);
day=BCDtoDex(day);
year=BCDtoDex(year);
lcd_write(0,1,0x32);
lcd_write(0,2,0x30);
lcd_write(0,3,0x30+year/10);
lcd_write(0,4,0x30+year%10);
lcd_write(0,6,0x30+month/10);
lcd_write(0,7,0x30+month%10);
lcd_write(0,9,0x30+date/10);
lcd_write(0,10,0x30+date%10);
lcd_write(0,14,0x30+day);
lcd_write(1,4,0x30+hr/10);
lcd_write(1,5,0x30+hr%10);
lcd_write(1,7,0x30+min/10);
lcd_write(1,8,0x30+min%10);
lcd_write(1,10,0x30+sec/10);
lcd_write(1,11,0x30+sec%10);
delayms(1005);//1ms
}
}
void Ds1302Init(void)
{
rst_l;
sck_l;
Ds1302Write(CONTROLADD,0);//關閉寫保護
Ds1302Write(MINADD,DextoBCD(06));
Ds1302Write(HRADD,DextoBCD(19));
Ds1302Write(DATEADD,DextoBCD(20));
Ds1302Write(MONTHADD,DextoBCD(5));
Ds1302Write(DAYADD,DextoBCD(7));
Ds1302Write(YEARADD,DextoBCD(12));
Ds1302Write(SECADD,DextoBCD(30));//寫秒,同時啟動時鐘
}
void WriteByte(uchar dat)//上升沿輸出
{
uchar i;
TRISC=0xdf;
for(i=8;i>0;i--)
{
sck_l;//低電平時數據線可變
if(dat0x01)
io_h;
else
io_l;
sck_h;
dat>>=1;
}
}
uchar BCDtoDex(uchar dat)//BCD碼轉十進制
{
uchar i;
i=dat/16;
dat%=16;
i=i*10+dat;
return i;
}
uchar DextoBCD(uchar dat)//十進制轉BCD碼
{
uchar i;
i=dat/10;
dat%=10;
i=i*16+dat;
return i;
}
uchar ReadByte(void)//下降沿輸出
{
uchar i;
uchar dat;
TRISC|=0x20;
for(i=8;i>0;i--)//要考慮之前寫完后的狀態,第一次進入此循環體即有下降沿
{
dat>>=1;
sck_l;
if(PORTC0x20)
dat|=0x80;
sck_h;
}
return dat;
}
void Ds1302Write(uchar add,uchar dat)
{
rst_l;
sck_l;
rst_h;
WriteByte(add);//最低位置0表示寫
WriteByte(dat);
rst_l;
}
uchar Ds1302Read(uchar add)
{
uchar dat;
rst_l;
sck_l;
rst_h;
WriteByte(add+1);//地址最低位置1表示讀
dat=ReadByte();
rst_l;
return dat;
}
void delayms(uint x) //8M晶振下,延時1ms
{
uint y,z;
for(y=x;y>0;y--)
for(z=220;z>0;z--);
}
void lcd_init(void)//LCD1602初始化
{
lcd_com(0x38);
lcd_com(0x0c);
lcd_com(0x06);
lcd_write(0,5,0xb0);
lcd_write(0,8,0xb0);
lcd_write(1,6,0x3a);
lcd_write(1,9,0x3a);
}
void lcd_com(uchar com)//向LCD1602寫命令
{
rs_l;
rw_l;
PORT=com;
delayms(1);
en_h;
delayms(1);
en_l;
}
void lcd_dat(uchar dat)//向LCD1602寫數據
{
rs_h;
rw_l;
PORT=dat;
delayms(1);
en_h;
delayms(1);
en_l;
}
void lcd_write(uchar c,uchar r,uchar dat)//向LCD1602指定行、指定列、寫數據
{
lcd_com(0x80+0x40*c+r);
lcd_dat(dat);
delayms(1);
}












評論