為什么說現在是智能雷達時代?

據麥姆斯咨詢報道,下一代高分辨率智能雷達傳感器對于實現L4級和L5級的自動駕駛至關重要。當然,攝像頭和激光雷達(LiDAR)在汽車傳感器系統中占有重要的地位。在遠距離探測、惡劣天氣或其它傳感器失靈的情況下,雷達是特別有用的!
本文引用地址:http://www.104case.com/article/201803/377520.htm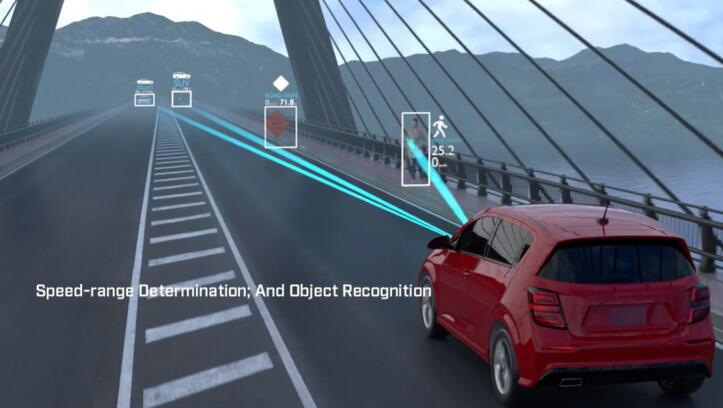
智能雷達的創新正在開始。當前自動駕駛領域要求打造一款全新的成像雷達系統,它既能夠像激光雷達一樣重建周圍環境,又可以像人一樣解讀周圍的世界,并且在全天候運行和探測距離方面完勝激光雷達和攝像頭。采用能夠形成波束并控制波束的工程超材料結構,可以打造一種全新的雷達架構,并在人工智能(AI)引擎驅動下,實現對物體的發現、識別、跟蹤和分類。
上述新一代雷達已經接近交付使用。這種超越數字發射波,使用超材料和人工智能的智能雷達,是實現自動駕駛的關鍵要素。這種新型雷達平臺的創新方案,尚存在的一些障礙,市場還有不少需要培育的地方,以及在下一代自動駕駛中使用智能雷達的前景,就這些問題,我們與麥得威國際(Metawave)的聯合創始人兼首席技術官Bernard Casse博士進行了討論。以下為相關的討論內容:
問:為什么說現在是雷達時代?
Bernard Casse(以下簡稱BC):利益相關者意識到自動駕駛發展時間軸取決于決策算法的成熟度和傳感器的性能。迄今為止,在改善激光雷達和攝像頭方面,特別是在自動駕駛方面,已經作出了巨大的努力,但我們在探測范圍和運行速度方面都遇到了性能門檻。然而,其它傳感器如雷達,則相對投入較少。因為與攝像頭或激光雷達相比,雷達一直處于劣勢,它缺乏解析世界的分辨率。但是,汽車制造商現在認識到,雷達是唯一能夠在長距離(200米以上)和全天候條件下工作的傳感器,它只是缺乏一定的“視覺和智力”。
利用先進的技術,我們可以令雷達“恢復”視覺并嵌入智能。這就是智能雷達時代。大約有十幾家初創企業重新審視了汽車雷達的各個方面。我們預計會有更多的初創企業和公司來解決這個問題。

問:作為一家頂級汽車公司的首席執行官,關于雷達您覺得用戶需要了解什么?
BC:Elon Musk把大量的重心放在雷達上是正確的。它仍然是汽車中最穩定可靠的傳感器。許多人,包括一些汽車制造商,對傳統的老式雷達很熟悉。當他們想到雷達時,會認為它是一種“視力”低下的傳感器,只能模糊“看到”整塊的金屬(打個比方,這里有一大塊金屬,那里有一小塊金屬)。對傳統雷達而言,情況的確是這樣,但下一代智能雷達就完全不同了。
點云成像(類似于激光雷達)可以通過光束掃描光柵和按照一定算法,實現對物體的圖像描繪,比如辨別路標、車輛類型、人、燈柱和更多物體。隨著視覺增強和速度的提高,我們可以在雷達中嵌入智能。也就是說,讓現在的雷達擁有一個增強的“數字眼”,它可以學習識別物體的特定特征,并將它們與相應的類別相關聯。
問:請您多談談人工智能的重要性?
BC:人工智能(AI)很關鍵,因為它是我們人類分散式智能背后的驅動力。我們是分散式智能的支持者。我們認為,雷達傳感器和任何其它傳感器都應該有自己的大腦。車輛中的決策算法應該依賴于傳感器融合(中央智能)和單個傳感器(分散式智能)。
這給汽車增加了另一層安全性。如果你的汽車使用攝像頭和/或激光雷達“看”到一座橋,現在你的雷達也可以說:“當然,我也能看到一座橋。”分散式智能的概念對雷達來說更為重要,因為它是目前唯一能看到前方300米的傳感器,以便成為最早提供預警的系統。當自動駕駛車輛有來自不同傳感器的多組數據,使汽車能夠接收信息并感知周圍環境,自動駕駛會更加安全。
問:當前雷達的發展狀況是怎樣的?特別是在自動駕駛方面。
BC:當今最先進的雷達是100%數字波束形成(DBF)。盡管在性能方面模擬雷達仍然表現卓越,但因為它的高成本、高功耗架構和復雜性,汽車工業拋棄了模擬雷達(如相控陣天線)。汽車工業對成本一直非常敏感,而且信號處理的成本最終會不斷下降,就像其它微芯片上的計算(摩爾定律)一樣,DBF仍然是一個誘人的選擇。
但DBF的分辨率和速度仍然有限。軍方更注重性能,對彈道導彈的探測和跟蹤仍然使用模擬雷達。對自動駕駛而言,成本不是也不應該是頭等大事,性能和安全性才是最重要的!
問:數字雷達的局限性是什么?
BC:DBF有三個主要缺點,它們有點相互關聯:
1、它很慢。DBF用于掃描場景的時間需要毫秒級的等待。在數字域中的信號處理是非常重要的。要達到可接受的信噪比(SINR),需要有毫秒級的積分時間。處理一系列復雜的模擬數字電路和為運行DBF而進行的數字權重的分配,都會造成更高的運算工作量,導致運行遲緩。
2、DBF缺乏分辨率——它看不到狹窄的物體或行人。它不是一個“真正”的波束形成架構,而且完全的波束成形是不切實際的。因為它需要大量的天線來實現高分辨率。首先,實現許多天線是非常昂貴的,需要在雷達芯片組上安裝多個端口(非傳統)。此外,這將需要更多的快拍數量以獲得一個可接受的SINR(因為全方位的噪音將讓系統超負荷)。憑借傳統的三個發送端口和四個接收端口,分辨率不夠清晰,無法看到行人。它適用于汽車(可在分辨率、SINR和范圍之間良好權衡),但不適合非金屬物體。
3、產生重影。DBF對高相關信號敏感,即DBF會增強來自多條路徑信號產生的噪聲,產生重影。

評論