室內智能照明控制系統電路設計 —電路圖天天讀(72)

隨著電子技術的飛速發展,基于單片機的控制系統已廣泛應用于工業、農業、電力、電子、智能樓宇等行業,微型計算機作為嵌入式控制系統的主體與核心,代替了傳統的控制系統的常規電子線路。樓宇智能化的發展與成熟,也為基于單片機的照明控制系統的普及與應用奠定了堅實的基礎。介紹了基于單片機AT89C51的室內燈光控制系統及其原理,提出了有效的節能控制方法。該系統采用了當今比較成熟的傳感技術和計算機控制技術,利用多參數來實現對學校教室室內照明的控制。系統以單片微型計算機為核心外加多種接口電路組成,共有六個主要部分:AT89C51芯片、光信號采集電路、人體信號采集電路、時鐘控制電路DS12887、輸出控制電路、定時監視器電路。
本文引用地址:http://www.104case.com/article/201710/369386.htm主控制器電路設計
主控制器采用AT89C51單片機作為微處理器,AT89C51是美國ATMEL公司生產的低電壓、高性能CMOS 8位單片機,片內含4K bytes的可反復擦寫的Flash只讀程序存儲器和128 bytes的隨機存取數據存儲器(RAM),器件采用ATMEL公司的高密度、非易失性存儲技術生產,兼容標準MCS-51指令系統,片內置通用8位中央處理器(CPU)和Flash 存儲單元。 主控制器系統的外圍接口電路由鍵盤、數碼顯示及驅動電路、晶振、看門狗電路、通信接口電路等幾部分組成。主控制器系統的硬件電路原理圖如圖2-2所示。

圖2-2 主控制器系統的硬件電路原理圖
RS485通信電路的設計
在各種分布式集散控制系統中,往往采用一臺單片機作為主機,多個單片機作為從機,主機控制整個系統的運行;從機采集信號,實現現場控制;主機和從機之間通過總線相連,如圖2-4所示。主機通過TXD向各個從機(點到點)或多個從機(廣播)發送信息,而各個從機也可以向主機發送信息,但從機之間不能自由通信,其必須通過主機進行信息傳遞。
本系統的有線通信方式采用RS485總線進行通信,RS485標準支持半雙工通信,只需三根線就可以進行數據的發送和接收,同時具有抑制共模干擾的能力,接收靈敏度可達±200mV,大大提高了通信距離,在100K bps速率下通信距離可達1200m,如果通信距離縮短,最大速率可達10M bps。在這里使用的是主從式通信方式,主機由主控制器充當,從機為分控制器。主機處于主導和支配地位,從機以中斷方式接收和發送數據,主機發送的信息可以傳送到所有的從機或指定的從機,從機發送的信息只能為主機接收,從機之間不能直接通信。主機與從機的通信電路圖分別如圖2-5與圖2-6所示。
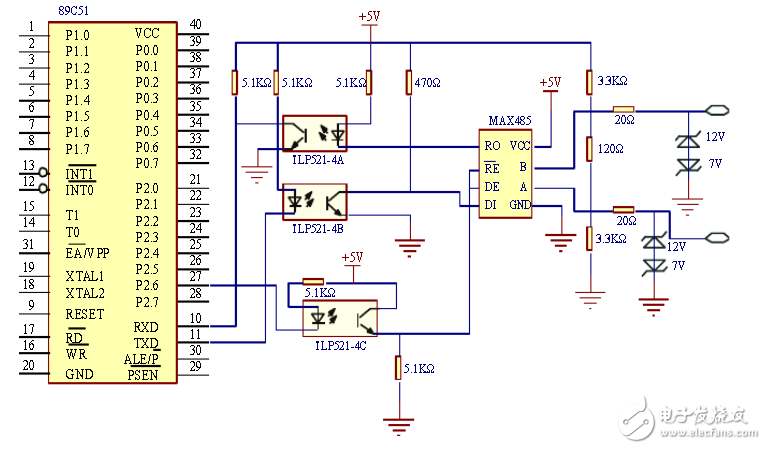
圖2-5 主機通信電路圖
語音識別被認定是未來物聯網領域的基礎需求之一,甚至將會無處不在,詳情請點擊進入》》》

從機通信與光信號取樣電路設計
主機與從機選用的RS485通信收發器芯片為MAX485,它是MAXIM公司生產的用于RS485通信的低功率收發器件,采用單一電源+5 V工作,額定電流為300 μA,采用半雙工通信方式。它完成將TTL電平轉換為RS485電平的功能。MAX485芯片內部含有一個驅動器和接收器。RO和DI端分別為接收器的輸出和驅動器的輸入端,與單片機連接時只需分別與單片機的RXD和TXD相連即可;RE和DE端分別為接收和發送的使能端,當RE端為邏輯0時,器件處于接收狀態;當DE端為邏輯1時,器件處于發送狀態,因為MAX485工作在半雙工狀態,所以只需用單片機的一個管腳控制這兩個引腳即可,主機與從機分別使用P2.6與P1.0腳進行控制;A端和B端分別為接收和發送的差分信號端,當A引腳的電平高于B時,代表發送的數據為1;當A的電平低于B端時,代表發送的數據為0。在進行通信時只需要一個信號控制MAX485的接收和發送即可。同時將A和B端之間加匹配電阻,這里選用120Ω的電阻。
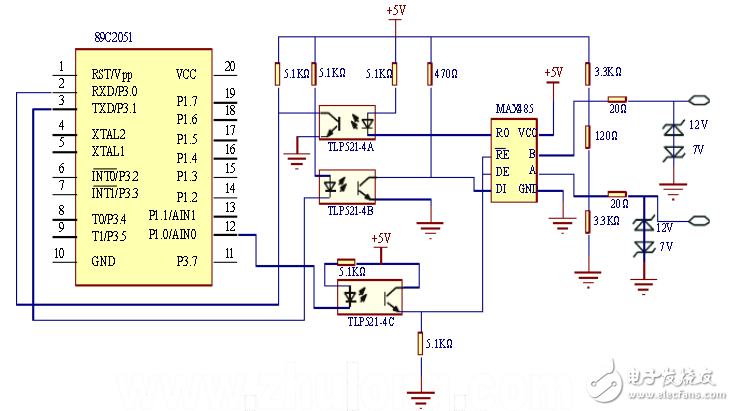
圖2-6 從機通信電路圖
為了提高系統的抗干擾能力,采用光電耦合器TLP521對通信系統進行光電隔離。從機使用單片機的P1.0控制通信收發器MAX485的工作狀態,平時置P1.0為低電平,使從機串行口處于偵聽狀態。當有串行中斷產生時判別是否是本機號,若為本機地址則置P1.0為高電平,發送應答信息,然后再置P1.0為低電平接收控制指令,繼續保持P1.0為低電平,使串行收發器處于接收狀態;若不是本機地址,使P1.0為低電平,使串行收發器處于接收偵聽狀態。
光信號取樣電路
光信號取樣電路如圖2-7所示,圖中主要由光信號采集電路和A/D模數轉換電路組成,其中模數轉換是電路的核心。信號經過采集送入A/D轉換電路,通過單片機處理后,最終作為系統應用程序進行開關燈判斷的依據。 A/D轉換器的位數應根據信號的測量范圍和精度來選擇,使其有足夠的數據長度,保證最大量化誤差在設計要求的精度范圍內。本系統中,信號的測量范圍的電壓:0.00—9.99V,精度0.01V。 在本次設計中選用了帶串行控制的10位模數轉換器TLC1549,它是由德州儀器(Texas Instruments簡寫為TI)公司生產的,它采用CMOS工藝,具有自動采樣和保持,采用差分基準電壓高阻抗輸入,抗干擾性能好,可按比例量程校準轉換范圍,總不可調整誤差達到(±)1LSB Max,芯片體積小等特點。同時它采用了Microwire串行接口方式,故引腳少,接口方便靈活。與傳統的并行方式接口A/D轉換器(例ADC0809/0808)相比,其單片機的接口電路簡單,占用I/O口資源少。
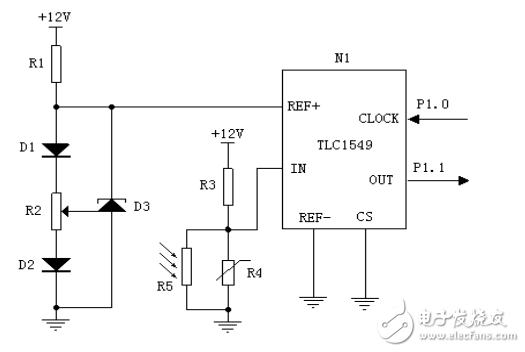
圖2-7 光信號取樣電路
電子發燒友網技術編輯點評分析:
本文基于AT89C2051單片機的智能照明控制系統的設計原理與實現方法。首先根據設計要求用Protel DXP軟件繪制出原理圖,然后依據原理圖選擇元器件,在實驗板上布置元器件并連接線路,對硬件電路進行測試,檢查串行口是否選錯,測量電源是否正常,復位電平是否正確,單片機是否起振等等。由于此設計是在相對理想的情況下設計,在實際應用時,需把燈光控制系統和放映設備電源分開。當應用于其他工作場所時,可根據實際需要添加或者減少部分模塊,如在道路使用時,則不需要時間控制電路;在室內使用時,還可以添加無線模塊,方便控制。
大家如有問題,歡迎在評論處討論。
——電子發燒友網整理,轉載請注明出處!












評論