單片機在超聲波測距中應(yīng)用電路設(shè)計

近年來,隨著單片機在我國的推廣,以其的簡單實用、功能強、體積小而日益廣泛的被廣大設(shè)計師采用,尤其在工業(yè)控制領(lǐng)域中應(yīng)用更為突出。筆者結(jié)合實際利用美國Atmel 公司的20 管腳處理器AT89C2051($0.5999) 設(shè)計了一套超聲波倒車測距系統(tǒng)。該系統(tǒng)由信號處理單元、微機控制單元組成,簡易而又實用,應(yīng)用較廣。這里著重介紹微機控制單元的軟硬件設(shè)計,并給出了軟件流程,以此為基礎(chǔ)可根據(jù)自己的需要作相應(yīng)擴展。
本文引用地址:http://www.104case.com/article/201710/369294.htm該系統(tǒng)的工作原理:由微機編程送出40kHz 頻率的方波信號至信號處理器,信號處理器通過兩級放大,再經(jīng)過壓電換能器將信號發(fā)射出去,該信號遇到障礙物反射回來在此稱為回波。同時,壓電換能器將接收的回波,通過信號處理的檢波放大、積分整形及一系列常見電路的處理,送至微機處理。顯示器的聲音告警頻率、發(fā)光二極管方位指示及障礙物距超聲波探頭的距離顯示均由單片機控制。
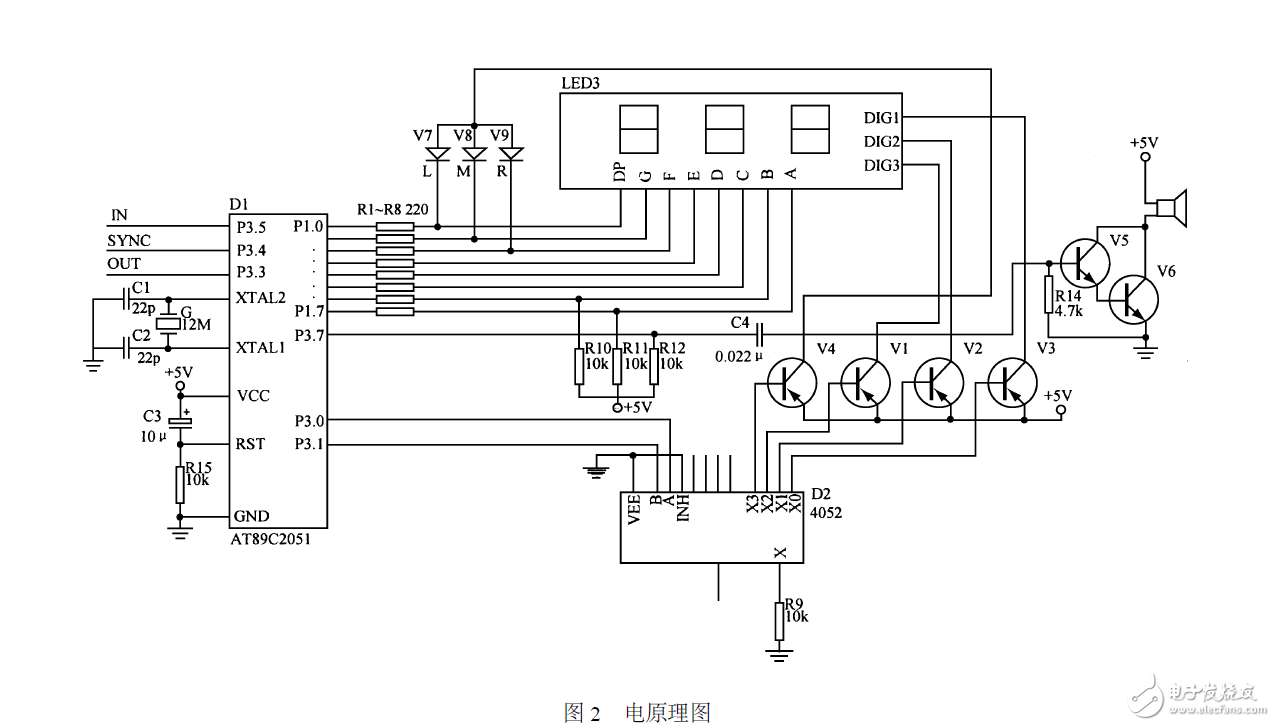
12 節(jié)循環(huán)鏈表,求每個超聲波探頭四次測得值的平均值,以減小誤差,再比較三個探頭平均值,最小的值即為最近的障礙物反射回來回波所需的時間。電原理圖如圖2 所示,其中圖2 中的P3. 4 即SYNC同步周期端接一循環(huán)移位計數(shù)器的CL K端,Q0 、Q1 、Q2 輸出分別控制三個超聲換能器使它輪流工作,電路圖及工作波形圖如圖3 、4 所示。










評論