基于MSP430的智能小車尋跡模塊設(shè)計(jì)方案

本文詳細(xì)介紹了反射式光電傳感器尋跡模塊的工作原理,尋跡模塊的電路圖以及在以MSP430單片機(jī)為控制核心的基礎(chǔ)上如何實(shí)現(xiàn)智能尋跡小車的自動(dòng)尋跡行駛。并簡要介紹了系統(tǒng)的電路圖。該技術(shù)可用于無人生產(chǎn)線、服務(wù)機(jī)器人、倉庫等領(lǐng)域。
本文引用地址:http://www.104case.com/article/201710/367238.htm0 引言
智能小車又稱輪式移動(dòng)機(jī)器人,能夠按預(yù)設(shè)模式在特定環(huán)境中自動(dòng)移動(dòng),無需人工干預(yù),可用于科學(xué)勘測、現(xiàn)代物流等方面。針對路面采用黑色標(biāo)記線條作為路徑引導(dǎo)線的應(yīng)用場合,反射式光電傳感器是常用的路徑識(shí)別傳感器。反射式光電傳感器因信號(hào)處理方式和物理結(jié)構(gòu)簡單的特點(diǎn)而被廣泛應(yīng)用于結(jié)構(gòu)化環(huán)境和低成本產(chǎn)品中,雖然存在檢測距離近、預(yù)測性差的弱點(diǎn),但通過合理設(shè)計(jì)和選擇反射式光電傳感器并結(jié)合合適的信息處理軟件能夠滿足上述簡單環(huán)境場合應(yīng)用。隨著汽車ECU 電子控制的發(fā)展,在汽車上配備遠(yuǎn)程信息處理器,傳感器和接收器,通過這些器件的協(xié)調(diào)控制可以實(shí)現(xiàn)汽車的無人駕駛。本文提出基于MSP430單片機(jī)的控制裝置,通過反射式光電傳感器尋跡,MSP430單片機(jī)處理反射式光電傳感器檢測到的信號(hào),從而控制智能車的轉(zhuǎn)向,實(shí)現(xiàn)智能小車的自動(dòng)尋跡。
1 系統(tǒng)總體設(shè)計(jì)方案
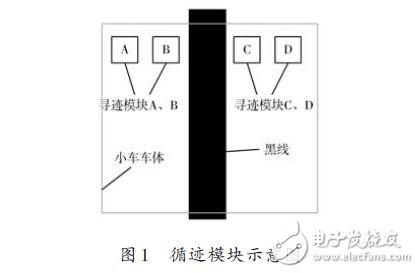
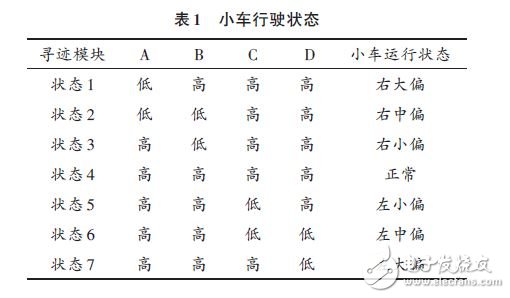
在小車車體的前端貼近地面的地方安裝有4 組尋跡模塊,如圖1所示,單片機(jī)通過判斷4個(gè)尋跡模塊發(fā)送來的信號(hào)進(jìn)行自動(dòng)循跡。尋跡模塊在遇到黑線時(shí)發(fā)送低電平信號(hào),遇到空白的地方發(fā)送高電平信號(hào),單片機(jī)通過判斷高低電平即可作出相應(yīng)的操作。通過4組尋跡模塊發(fā)送的信號(hào)組合,可將小車行駛狀態(tài)分成如表1所示7種狀態(tài)。
單片機(jī)通過判斷當(dāng)前的運(yùn)行狀態(tài),然后對L298 驅(qū)動(dòng)模塊進(jìn)行相應(yīng)的操作。當(dāng)正常時(shí),不進(jìn)行調(diào)整;當(dāng)左偏時(shí),通過對L298 驅(qū)動(dòng)模塊進(jìn)行調(diào)整,使小車的左輪速度大于右輪速度,即可實(shí)現(xiàn)小車向右調(diào)整。由于左偏有三種情形,但每種情形只是使能端的PWM 參數(shù)不同。當(dāng)右偏時(shí),處理流程與左偏類似。
2 尋跡模塊的硬件設(shè)計(jì)
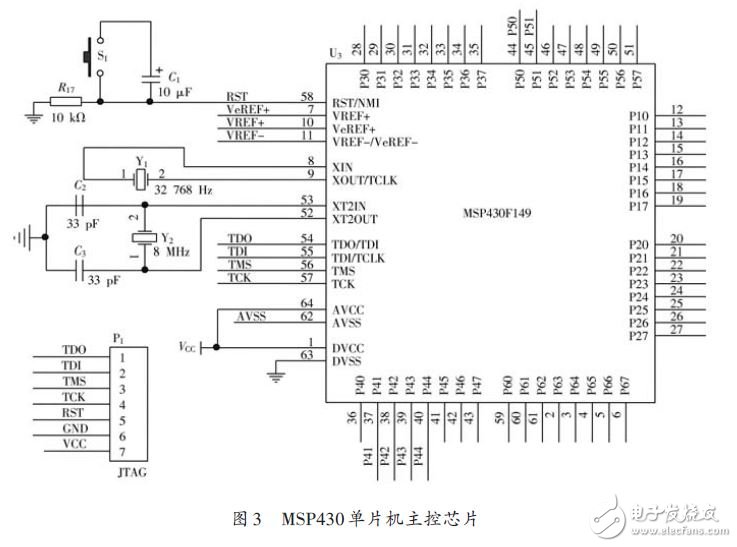
繪制完成的反射式光電傳感器電路圖如圖2 所示。該電路的工作原理為:當(dāng)光耦TCRT5000 有光線反射回來,即遇到白色等反光能力強(qiáng)的跑道,放大器LM324AD 的輸出端輸出為高電平,反之,輸出為低電平。單片機(jī)通過控制LM324AD 的輸出端電壓即可做出相應(yīng)的控制操作。四個(gè)相同的此模塊分別與單片機(jī)的P41,P42,P43,P44引腳相連。單片機(jī)模塊如圖3所示。
3 循跡模塊的軟件設(shè)計(jì)
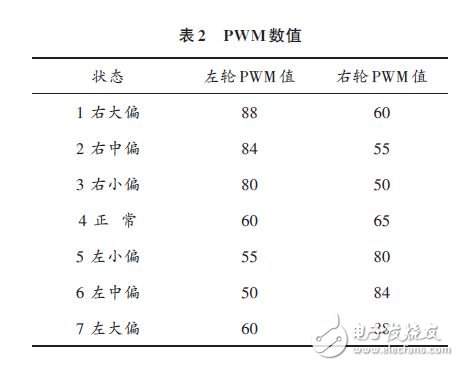
在小車的自動(dòng)控制模式下,單片機(jī)通過判斷4個(gè)尋跡模塊發(fā)送回來的不同信號(hào)進(jìn)行相應(yīng)的操作。整體的思路為:小車左偏則左輪的速度要大于右輪的速度小車才能恢復(fù)正常,小車右偏則右輪的速度要大于左輪的速度小車才能恢復(fù)正常,當(dāng)小車正常時(shí)兩側(cè)輪子的速度相同 [6]。由上面的分析可知速度的快慢可通過對L298使能端PWM值的控制進(jìn)行調(diào)節(jié)。通過多次調(diào)試可得出如表2所示的PWM數(shù)值。
4 MCU控制與算法實(shí)現(xiàn)
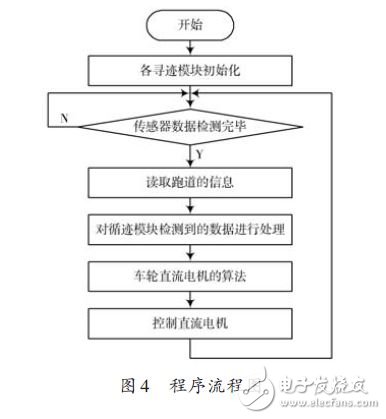
系統(tǒng)控制由微處理器完成,微處理器采用MSP430單片機(jī),當(dāng)單片機(jī)讀入傳感器的信號(hào)后即可判斷小車當(dāng)前的行駛狀態(tài),具體流程如圖4所示。
5 系統(tǒng)設(shè)計(jì)方案
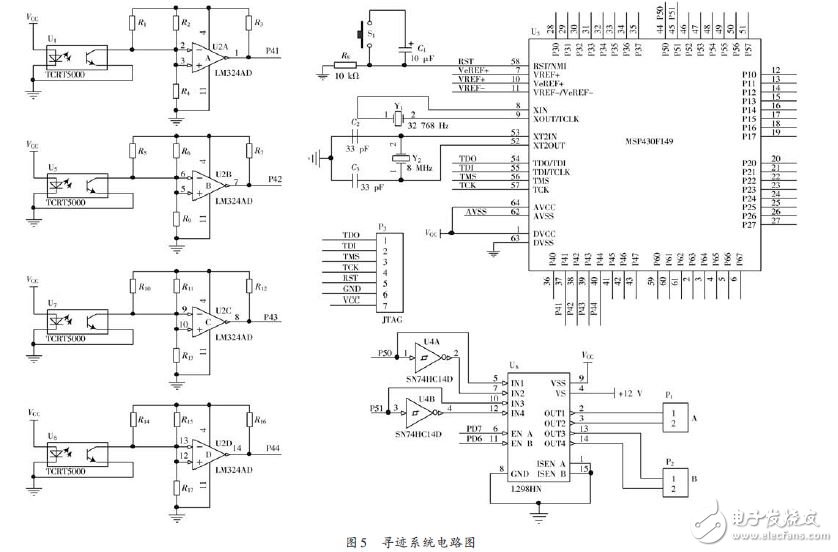
本文設(shè)計(jì)的智能小車尋跡系統(tǒng)的電路如圖5 所示。其中U1、U5、U7、U8 分別為反射式光電傳感器A、B、C、D,布局如圖5 所示,負(fù)責(zé)采集軌道信息。U6 為L298驅(qū)動(dòng)模塊,負(fù)責(zé)控制智能小車兩側(cè)直流電機(jī)。
6 結(jié)語
本文所設(shè)計(jì)的方案通過對智能車尋跡模塊的研究,分析MSP430單片機(jī)的應(yīng)用,利用感光傳感器信息來控制智能車的自動(dòng)轉(zhuǎn)向,實(shí)現(xiàn)了智能車的自動(dòng)尋跡。該尋跡系統(tǒng)的工作流程可概括為:通過四個(gè)外置的反射式紅外線傳感器收集軌道信息,在通過微處理器對采集到的信息進(jìn)行處理,然后將處理后的信息通過PWM 信號(hào)傳遞給L298 驅(qū)動(dòng)模塊,L298 模塊根據(jù)接收到的軌道信號(hào)控制智能車兩側(cè)直流電機(jī)的運(yùn)行狀態(tài),最終達(dá)到尋跡的目的。智能車在軍事、工業(yè)和民用領(lǐng)域的實(shí)際應(yīng)用中,涉及到如何構(gòu)造完整的導(dǎo)航系統(tǒng)以及多種傳感器數(shù)據(jù)融合及控制算法等,這需要在實(shí)踐中不斷研究探索。












評(píng)論