詳析數(shù)字I/O和邏輯分析儀常用術(shù)語

本文介紹了數(shù)字I/O和邏輯分析儀的常用術(shù)語和定義。
本文引用地址:http://www.104case.com/article/201710/366604.htm1.抖動
抖動是指與事件理想時序的偏差,并通常基于參考信號的過零點進行測量。 抖動通常來自于串擾、同步開關(guān)輸出和其它定期發(fā)生的干擾信號。 由于抖動會隨時間變化,抖動的測量和量化既可以是秒級范圍內(nèi)視覺估計,也可以是基于統(tǒng)計的測量,比如基于標準偏差隨時間變化的統(tǒng)計測量。
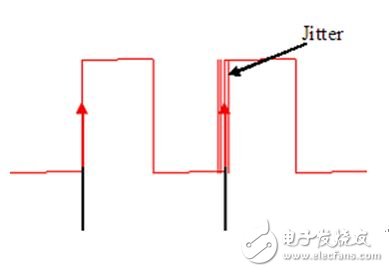
圖1.數(shù)字信號抖動示例
2.偏移
對于定時(動態(tài))生成,通道間偏移定義為兩個數(shù)據(jù)通道對應(yīng)邊沿之間的時間差。 例如,如果兩個數(shù)據(jù)通道均設(shè)置為在特定采樣時從低電平轉(zhuǎn)換為高電平,兩個通道上升沿之間的時間差就是兩個通道之間的通道間偏移。
對于動態(tài)采集,通道間偏移定義為每個數(shù)據(jù)通道采樣時間之間的差。 每次采集采樣點時,每個數(shù)據(jù)通道進行采樣的時間是不相同的,但是它們之間的時間差非常小,通常會落在某個特定的時間窗口內(nèi)。 這個時間窗口就稱為通道間偏移。
下圖顯示了一組信號的通道間偏移。
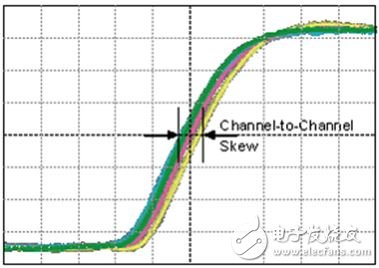
圖2.數(shù)字信號偏移示例
指定的通道間偏移一般是指某個設(shè)備上所有數(shù)據(jù)信道之間的偏移。
3.上升時間和下降時間
上升時間(trise) 是指信號在高低電平之間從高電平的20%上升到80%所經(jīng)歷的時間。 下降時間 (tfall)是指信號在高低電平之間從高電平的80%下降到20%所經(jīng)歷的時間。
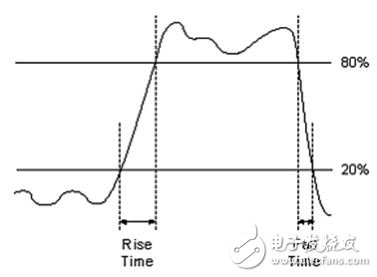
圖3.數(shù)字信號上升時間和下降時間圖
4.過沖和下沖
前沖和過沖主要指脈沖上升或者下降沿前(前沖)或后(過沖)的脈沖瞬時電平峰值失真。 圖4顯示了信號前沖和過沖的一個例子。
注意:過沖、前沖和下沖均是不正常現(xiàn)象。
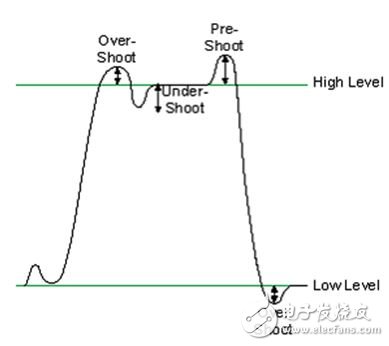
圖4.數(shù)字信號過沖、前沖和下沖圖
5.穩(wěn)定時間
穩(wěn)定時間(tS)是指放大器、繼電器或其它電路達到穩(wěn)定運行所需的時間。 對于信號采集而言,滿幅階躍的穩(wěn)定時間是指信號達到一定的精度并保持在這個精度范圍內(nèi)所經(jīng)歷的時間。
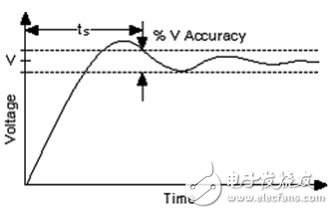
圖5.數(shù)字信號的穩(wěn)定時間圖
6.占空比
對于時鐘信號,占空比是指波形處在邏輯高電平的時間與波形周期之間的比值。 下圖顯示了兩個具有不同占空比波形之間的差異。 請注意,占空比為30%的波形處于邏輯高電平的時間少于占空比為50%的波形。
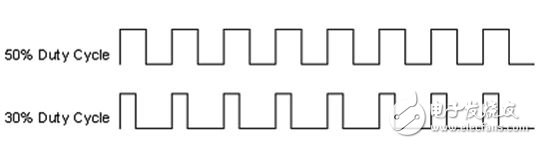
圖6. 數(shù)字信號占空比圖
7.遲滯
遲滯是指檢測到信號從邏輯高電平轉(zhuǎn)變?yōu)檫壿嫷碗娖胶蛷倪壿嫷碗娖睫D(zhuǎn)變?yōu)檫壿嫺唠娖綍r的電壓電平之差值。 請參閱圖7的遲滯圖解。
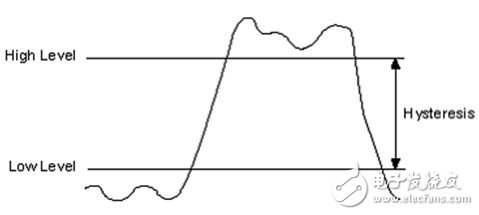
圖7.數(shù)字信號的遲滯圖
所有數(shù)字邏輯器件的數(shù)字輸入均存在一定程度的遲滯。 特定設(shè)備的滯環(huán)幅值可以通過以下公式計算得到:
遲滯 ≈ VIH - VIL
在輸入端數(shù)字信號的上升沿,設(shè)備在VIH時檢測到信號從邏輯低電平轉(zhuǎn)變?yōu)檫壿嫺唠娖健?相反地,當設(shè)備輸入端電壓低于VIL時設(shè)備檢測到信號的電平從邏輯高變?yōu)檫壿嫷汀?/p>
遲滯是數(shù)字設(shè)備一個非常有用的屬性,因為它可在一定程度上抑制數(shù)字系統(tǒng)的高頻噪聲。 這種噪聲通常是由邏輯電平轉(zhuǎn)換的高邊沿速率反射引起的,如果僅使用一個電壓閾值來確定邏輯狀態(tài)的變化,該噪聲可能會導(dǎo)致數(shù)字設(shè)備進行錯誤的電平轉(zhuǎn)換檢測。 這一現(xiàn)象可通過圖8清晰看出。
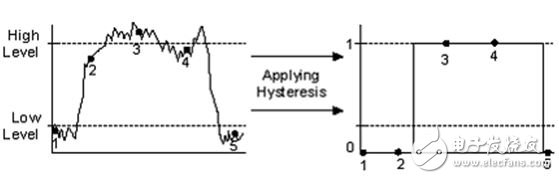
圖8.噪聲可能對遲滯造成的影響
在該圖中,第一個采樣點為一個邏輯低電平。 第二采樣點也是一個邏輯低電平,因為信號電平尚未沖過高電平閾值。 第三和第四個采樣點是邏輯高電平,第五個采樣點是邏輯低電平。
對于具有固定電壓閾值的設(shè)備,系統(tǒng)的噪聲抗擾度(NIM)和遲滯是由系統(tǒng)的組件決定。 例如,部分NI數(shù)字I/O設(shè)備可允許您控制系統(tǒng)的NIM和遲滯。 系統(tǒng)NIM和遲滯可使系統(tǒng)具有一定的噪聲抗擾度,但對于特定的邏輯設(shè)備,通常需要在這兩者之間做出權(quán)衡——遲滯越大,NIM越小;反之亦然。 如果要正確設(shè)置電壓閾值,您必須仔細檢查系統(tǒng)的信號質(zhì)量,以確定您是需要在高低電平時獲得更高的抗噪性能(更高的NIM)還是需要在邏輯電平轉(zhuǎn)換時獲得更高的抗噪性能(更高的滯環(huán))。



評論