基于FPGA的虛擬現實定位系統

虛擬現實技術是目前計算機信息科學中的前沿學科,文中設計了一種以FPGA 為核心的數據采集處理系統.利用HMC5883L和ADXL345對虛擬場景中物體的方位和朝向進行確定并通過以太網給虛擬場景主機發送數據.整個系統以 FPGA作為主控制器,配以傳感器數據采集,內部FIFO存儲,以太網高速傳輸,從而把定位系統參數實時傳送到上位機中,具有傳輸速度快.實時性等優點,實現了虛擬現實高精度定位的功能.
本文引用地址:http://www.104case.com/article/201710/365832.htm1 引言
虛擬現實(Virtual Reality,VR)是目前計算機應用方面活躍的技術研究領域,是整個信息科學領域中的新興技術.它是依據計算機視頻技術為基礎,將計算機圖像處理.計算機心理學.人工智能.人機交互技術.傳感器技術.網絡以及顯示處理一系列信息技術分支的最新成果集中在一起.在虛擬現實環境中,人可以與虛擬世界中的場景和事物進行交互,它已經滲入到了航空航天.民用軍事.娛樂游戲.醫療醫用以及教育等行業.目前它已經是21世紀發展過程中影響人類生活的重要技術之一.
整個虛擬現實中,在場景中對物體的定位是關鍵核心部分.在定位中主要是要獲得物體所處的直角平面坐標系中的朝向和位置以及物體與水平面的傾斜角.為此我們使用三維磁阻傳感器和三軸重力加速度來獲取所必須的數據.
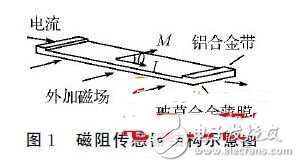
磁阻效應傳感器是根據磁性材料的磁阻效應構成的.圖1為簡單的磁阻效應傳感器的結構示意圖.由于磁性材料(如坡莫合金)具有各向異性,對它進行磁化時,其磁化方向將取決于材料的易磁化軸.材料的形狀和磁化磁場的方向.所以在其線性范圍內,電橋的輸出電壓與被測磁場成正比.同時利用XYZ 三個方向上的磁通量進行三角函數的轉換可知道方位角為X方向上與Y方向上面的反正切值.
三軸重力加速度傳感器為多晶硅表面微加工結構,置于晶圓頂部.由于應用加速度,多晶硅彈簧懸掛于晶圓表面的結構之上,提供力量阻力.差分電容由獨立固定板和活動質量連接板組成,能對結構偏轉進行測量.加速度使慣性質量偏轉.差分電容失衡,從而傳感器輸出的幅度與加速度成正比.相敏解調用于確定加速度的幅度和極性.
虛擬現實定位技術在國內外發展很迅速,主要在醫療與娛樂方面取得了成就.國內傳統的技術主要是以單片機為核心處理器,在數據的處理和傳輸速度上有明顯的不足.本文的虛擬定位系統利用高精度的定位傳感器,FPGA處理和傳輸數據能夠高速.實時的對數據進行采集與處理,降低了傳輸壓力,提高了數據吞吐量與設備利用率.現場可編程邏輯門陣列FPGA,是現代IC設計驗證的主流ASIC器件.FPGA設計靈活,易于修改,可靠性高,開發周期短,處理速度快,易于實現高速電路的設計,可以方便的對定位傳感器進行驅動,并對其數據進行快速的處理和傳輸.
數據采集系統總體設計結構
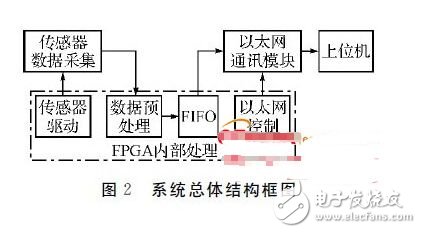
本文采用了Xilinx公司spartan3系列的 FPGA,ADI公司的ADXL345三軸重力加速度傳感器以及Honeywell公司的HMC5883L三維磁阻傳感器,利用了模塊化的結構分別對每個單元進行流水線操作.整個系統主要包括:FPGA核心處理模塊.硬件電源模塊.場景數據處理模塊.以太網通訊模塊.當物體的方位角和傾斜角發生變化的時候,ADXL345模塊和HMC5883L模塊會將新的數據存儲到FPGA中的FIFO里,最后通過以太網以UDP包的方式上傳到上位機分析處理.系統中的接口電路主要有ADXL345與FPGA的接口.HMC5883L與FPGA的接口.以太網芯片與FPGA 的接口電路.系統上電以后,FPGA發出的信號包括兩個傳感器時鐘驅動信號,以太網芯片控制信號.FPGA內部的信號包括FIFO控制信號.傳感器信號傳入的控制信號.系統的工作過程為:FPGA 對各傳感器和以太網進行正確的驅動后,傳感器開始以一定的頻率向FPGA發送數據,當FPGA接收到一次數據后馬上將數據存儲在FIFO中;同時FIFO 在相應的條件下按照寫時鐘把數據一次存儲好,按照時鐘把原來存儲的數據發送給以太網芯片;以太網芯片把這些數據封裝成UDP包,通過以太網總線上傳給上位機;最后,上位機在收到有效的數據時,對數據進行分析處理,然后傳給三維軟件部分使得三維場景中的物體也發生同樣的方位角和傾斜角的變化,實現了虛擬現實的功能.
數據采集系統模塊化設計
3.1 HMC5883L數據采集模塊設計
場景數據模塊是整個測量系統的基礎部分,也是整個電路工作的必不可少的一個模塊.其中包括了測量方位角用的HMC5883L磁阻傳感器芯片以及測量傾斜角 的三軸重力加速度傳感器ADXL345、HMC5883L是一種表面貼裝的高集成模塊,并帶有數字接口的弱磁傳感器芯片,應用于低成本羅盤和磁場檢測領域.
HMC5883L的時鐘是一系列的I2 C驅動時鐘周期.本模塊的設計目標在于將三維磁阻傳感器芯片HMC5883L良好的驅動并確定時序中數據的傳輸順序.目前采用FPGA引腳對相對應的時序進行控制.
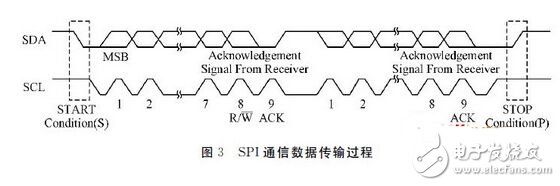
HMC5883L傳感器固定的時序中完成對數據的采集,采集到的數據是具有特定格式的數字量,需要經過一定算法分析和數據整理才能送往上位機進行操作. FPGA 與HMC5883L的通信采用了I2 C的通信手段,在代碼編寫的過程中采用了標準速率模式100kHz,在總線規定中,總線的位格式是一個8位數據/地址傳送和1位應答位.如圖3所示的格式 的時序情況.(點擊可查看大圖)
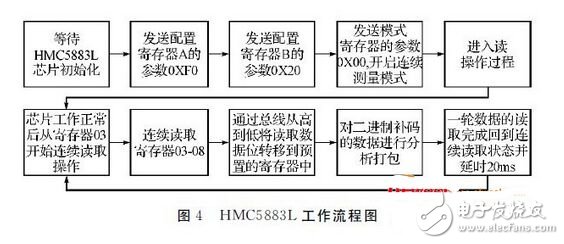
HMC5883L的工作流程:首先要芯片的初始化進行數據等待,之后使用I2C的傳輸方式對數據進行控制.一個測試前的過程需要對應有的測量寄存器進行對 應的配置.首先發送配置寄存器A的配置量,為寫操作,寄存器指令為默認值;第二步發送配置寄存器B的配置量,同樣也為默認值;第三步發送模式寄存器的配置 量,即發送數據0X00(即連續測量模式).此時配置的寄存器的流程已經走完.之后進入讀操作模式,此時根據時鐘的采樣速度,循環對傳感器內部寄存器 03-08進行操作,得到X、Y、Z 三個方向上的數據,讀入到代碼設定的寄存器中.具體操作流程如圖4所示.
3.2 ADXL345數據采集模塊設計
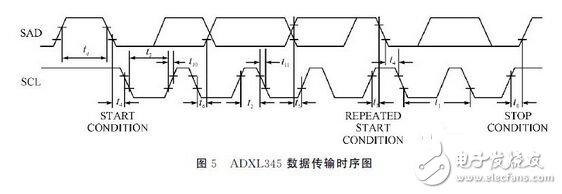
ADXL345在虛擬場景系統中用于測量傾斜角,它的時鐘驅動也是一系列的I2 C驅動時鐘周期.本模塊的設計也是針對于ADXL345的時鐘驅動和對應的數據讀取所進行的.傾斜角的寄存器內容的獲取是整個模塊的主要內容.
在實際的場景系統中主要用到了X、Y、Z 三個方向上的偏移寄存器,用于測量中修正原始位置的測量誤差.對于數據采集速率則是由寄存器OX2C即寄存器BW_RATE的CH0-CH3所控制.對于 三維重力加速度傳感器而言,主要的初始化也是通過常見的I2 C總線與FPGA 進行通信,在數據獲取方面集中在X、Y、Z 三個重力方向上的寄存器數據.其時序圖如圖5 所示,代碼編寫過程中與HMC5883L共用總線同時都受FPGA的控制,屬于系統控制的從端.同樣的,三維重力加速度傳感器也需要根據測量需求去輸入初 始化寄存器的配置.然后對需要讀取的寄存器數據位進行總線讀取,并存入到配置好的8bit寄存器保存好打包傳往上位機進行數據分析.(點擊可查看大圖)
3.3 場景數據分析
在地磁的測量過程中需要對數據進行必要分析才能得到對應的方位角度.
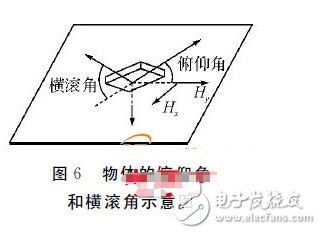
由HMC5883L 和ADX345傳感器我們可以得到地磁場在空間三個軸上的分量磁場大小分別為Hx、Hy、Hz以及加速度傳感器測量俯仰角φ 和橫滾角θ.

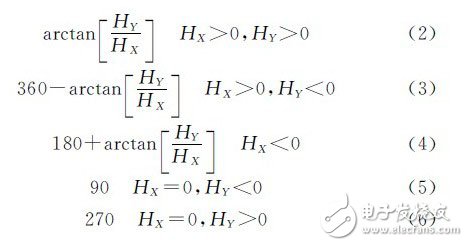
式中Ax、Ay、Az是重力加速度傳感器三個方向上測量得到的加速度值.在特定的公式計算下可以大致得到目前物體所處的順時針方位角a為
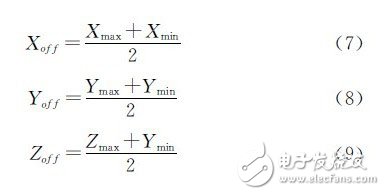
以上是初步估計出來得到方位角參數,計算中不可忽略的還有HMC5800L還受到外部磁性干擾,其中較為突出的是硬磁效應和軟磁效應[8~9]一般而言 對于硬磁效應,我們采取的方法是將物體至于場景中旋轉360°,然后經過多次的采樣得到X、Y、Z 坐標的最大值Xmax、Ymax、Zmax和最小值Xmin、Ymin、Zmin然后對于硬磁效應來說就是偏移量為
硬磁效應只需要使用測試的數據值加上off 的偏移值便可,而對于軟磁效應,補償的方法比較復雜,一般可以使用公式進行適當的估算,項目中初步使用式(12)進行補償.其中Xr為真實的無干擾的坐標 值,a為其干擾系數,一般軟磁干擾就需要大量的數據去得到a 的值.一般情況下可以采取特定的角度進行數據采樣,然后根據數據的

實際值Xr和對應無干擾的值Xc進行運算,求出a的這個系數的值便可.
3.4 以太網通訊模塊設計
LAN8700是SMSC公司的一款以太網物理層芯片.
LAN8700由編碼器/解碼器.擾碼器/解擾器.波形整形器.輸出驅動器.自適應均衡雙絞線接收器.時鐘數據恢復功能模塊組成.
FPGA模塊編程中定義了UDP_User_int模塊來實現數據打包的詳細過程,另外MAC的物理層通信由MAC_top模塊來實現,包括PHY的初始 化.時鐘的控制.發生數據的控制.MII接口的控制.接收數據控制,寄存器的控制等,都定義了UDP_TOP頂層模塊來實現FPGA與它們的接口順利傳輸 數據.以太網驅動模塊實現的RTL門級結構圖如圖7所示.
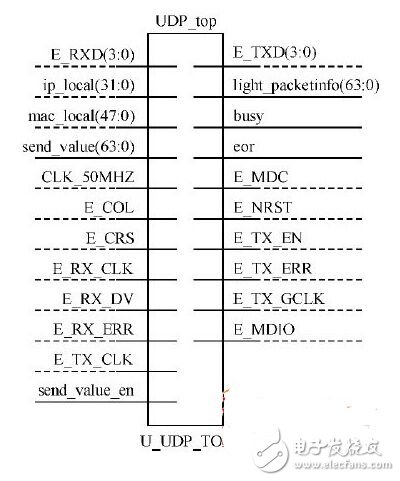
其中ip_local和mac_local是本地IP和MAC地址;每組E_RXD和E_TXD都是4個32位數據,E_RXD是接收MAC層的數 據,E_TXD是發送給MAC層的數據;每組send_zb_value都是64個32位數據,打包成了UDP包,send_zb_value是發送至以 太網的UDP包,同時定義了send_en來作為發送數據的使能信號;E_COL和E_CRS分別是沖突檢測和載波偵聽信號,他們的作用是用來控制著 UDP包的正確發送.
4 結語
設計中使用了HMC5883L芯片對物體的方位角進行測定,使用輔助芯片ADXL345來判定傾斜角和物體翻滾姿態,使得物體在虛擬場景中的實際情況更為 精準.利用FPGA對數據的高速處理能力將采集到的場景定位內容迅速分析處理并且通過以太網控制芯片發往局域網中的上位機中,最終在上位機實現虛擬場景的 變動.整套硬件系統能夠穩定的工作在研發的項目之中,工作性能良好.能耗低,精度可達1°以內的范圍.













評論