基于Dragonboard 410c實現(xiàn)科大訊飛麥克風陣列模塊的語音喚醒控制及US-100超聲波應用

前言:本文主要是針對沒有接觸過Dragonboard 410c開發(fā)板的朋友,教大家如何從裸板搭建平臺以及通過這個平臺如何去實現(xiàn)科大訊飛麥克風陣列模塊的語音喚醒控制以及US-100超聲波的實際應用,總而言之通過這個過程我相信大家可以更進一步的體驗到Dragonboard 410c開發(fā)板的樂趣了。
本文引用地址:http://www.104case.com/article/201710/365549.htm一、準備工作
1.Dragonboard 410c開發(fā)板及其配件
Dragonboard 410c開發(fā)板是一個低成本的64位ARM開發(fā)平臺,可以支援 Android 、TIzen OS、FireFox、Linux 等各個系統(tǒng)平臺,而且支持Win10設備家族,DragonBoard 410C是第一款集成了WiFi、藍牙和GPS,已經(jīng)智能機級別Snapdragon 410芯片的集成版。
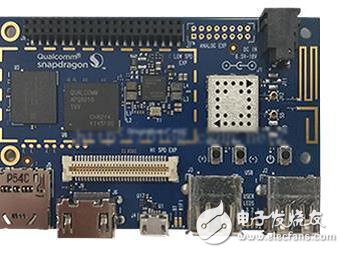
主要特性有:
· CPU:四核ARM Cortex®-A53 CPU,單核心最高主頻可達1.2 GHz;64位處理能力;
· 圖形:Qualcomm Adreno™ 306 GPU,支持400MHz高質量圖形處理;
· 視頻:1080p高清(HD)視頻播放和拍攝,支持H.264(AVC);
· 攝像頭:支持1300萬像素攝像頭,硬件支持小波降噪、JPEG解碼和其他硬件后處理技術;
· 內存:LPDDR2/3 533MHz單信道32位(4.2GBps) non-POP/ eMMC 4.51 SD 3.0 (UHS-I);
· 集成連接:Qualcomm VIVE™ 802.11 b/g/n、Wi-Fi、Bluetooth、FM;
· 集成定位:Qualcomm IZat™ Gen8C;
· 操作系統(tǒng)支持:Android和Linux;
· 擴展接口:1x 40 管腳低速接口(UART、SPI、I2S、I2C x2、GPIO x12和直流電源,
1x 60 管腳高速接口(4L-MIPI DSI、USB、I2C x2、2L+4LMIPI CSI)和模擬擴展接口(耳機、揚聲器和FM天線);
· 輸入/輸出界面:HDMI全尺寸A類接口(1080p高清@30fps),1x USB 2.0 micro B(僅用于終端模式),2x USB 2.0 A類(僅用于主機模式),micro SD卡插槽。
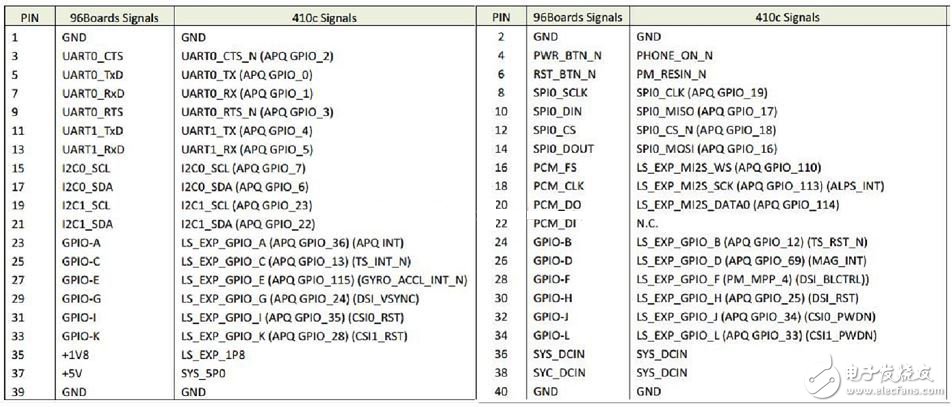
Low speed Expansion connector接口分布:
2.科大訊飛麥克風陣列模塊 XFM10411
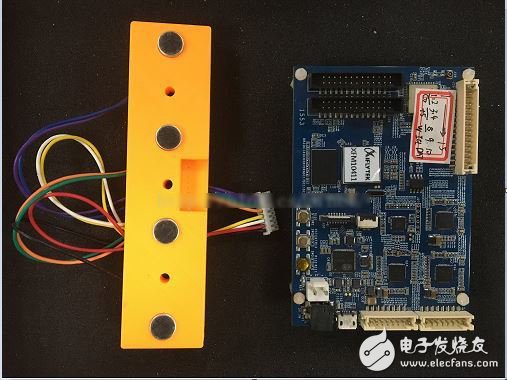
它是一款基于4麥克風陣列的語音硬件前端方案, 利用麥克風陣列的空域濾波特性,在目標說話人方向形成拾音波束,抑制波束之外的噪聲和反射聲。 模塊主要功能是完成 4 麥克風陣列、降噪、回聲消除、語音喚醒等語音前端處理,輸出降噪后的音頻信號、聲源角度數(shù)據(jù)、喚醒觸發(fā)信號、通訊等。
本模塊有 3 個接口器件 J26、 J21 和 J22;其中 J26 上包括電源接口、 I² C 通訊接口、喚醒信號、音頻輸出等。 J21 是麥克風陣列的接入接口, J22 是回聲消除參考信號的接入接口。
產(chǎn)品優(yōu)勢主要表現(xiàn)在 :
麥克風陣列
聲源定位
語音喚醒
回聲消除
語音打斷
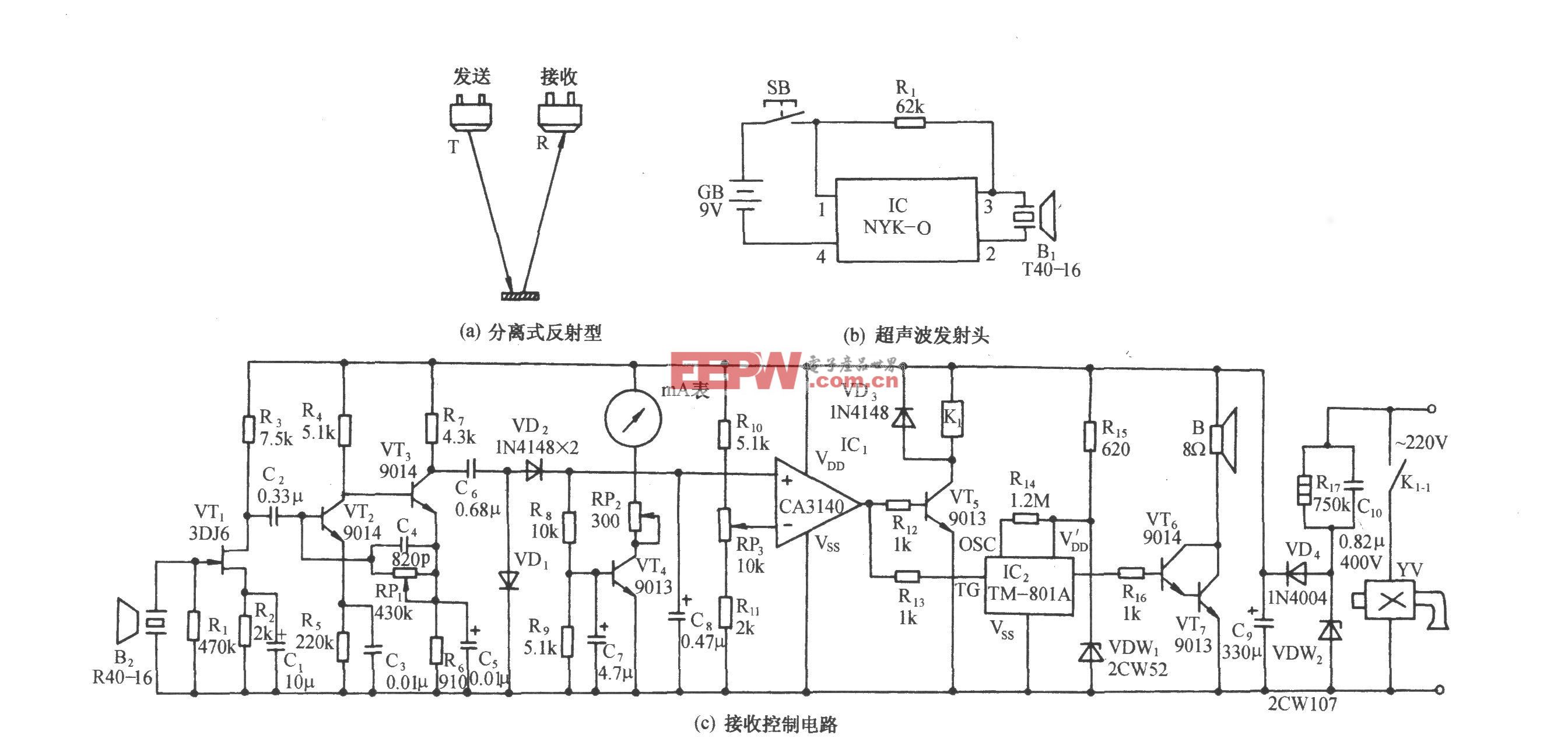
3.US-100 超聲波測距模塊
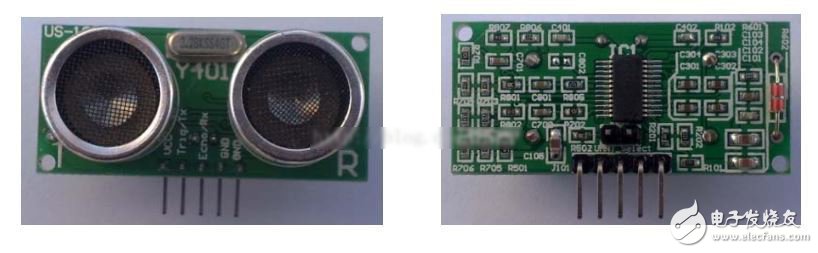
US-100 超聲波測距模塊可實現(xiàn) 2cm~4.5m 的非接觸測距功能,擁有 2.4~5.5V 的寬電壓輸入范圍,靜態(tài)功耗低于 2mA,自帶溫度傳感器對測距結果進行校正,同時具有 GPIO,串口等多種通信方式,內帶看門狗,工作穩(wěn)定可靠。
本模塊共用到如下 4 個接口:
1號 Pin:接 VCC 電源(供電范圍 2.4V~5.5V);
2號 Pin: 當為 UART 模式時, 接外部電路 UART 的 TX 端;當為電平觸發(fā)模式時,接外部電路的 Trig 端;
3號 Pin: 當為 UART 模式時, 接外部電路 UART 的 RX 端;當為電平觸發(fā)模式時,接外部電路的 Echo 端;
4號 Pin:接外部電路的地。
二、軟件環(huán)境
1.此處我們介紹快速搭建運行環(huán)境,大家可以先通過以下網(wǎng)絡鏈接下載鏡像。
基于Dragon Board410c與科大訊飛麥克風陣列模塊的語音喚醒控制以及US-100超聲波的實際應用鏡像文件
2.我們可以參考以下鏈接安裝鏡像,待硬件連接好后,我們啟動安裝好的系統(tǒng)后,打開測試軟件即可測試以下;
SensorDemo
聲源定位:模塊可以準確給出說話人的方位,定位信息提供給麥克風陣列確定錄音波束;
語音喚醒:模塊預定的語音喚醒詞是“靈犀 靈犀”,喚醒后通過模塊的 WAKEUP 接口輸出高電平給用戶上位機;
超聲波測距:模塊可實現(xiàn) 0~4.5m 的非接觸測距。
三、硬件連接
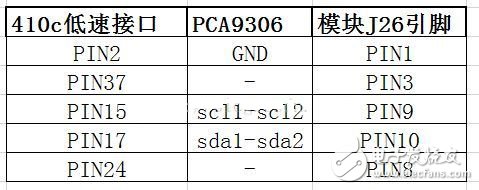
1.科大訊飛麥克風陣列模塊與Dragonboard 410c開發(fā)板連接
Dragonboard 410c開發(fā)板的低速接口通過PCA9306雙向電平轉換器連接到麥克風陣列模塊的J26引腳上:
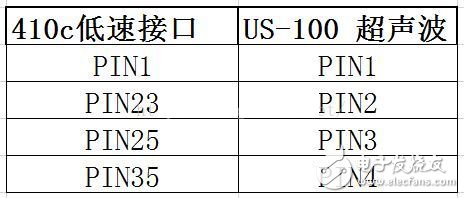
2.US-100超聲波測距模塊與Dragonboard 410c開發(fā)板連接
Dragonboard 410c開發(fā)板的低速接口通過PCA9306雙向電平轉換器連接到US-100超聲波:
四、測試程序
1.完成一、二后,通電進入系統(tǒng),打開桌面上的sensor_demo APP,如下圖
2、進入軟件后點擊超聲波測距測試按鈕,就可以實時的顯示測試結果,如圖:
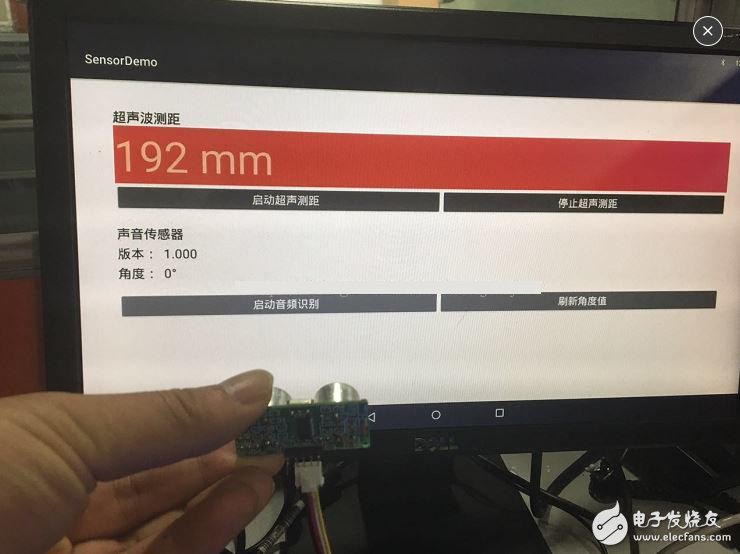
3.同上點擊啟動音頻識別按鈕,就可以實現(xiàn)語音喚醒屏幕(在息屏的前提下,從任意方向超語音識別模塊講“靈犀靈犀”的關鍵詞就會喚醒屏幕以及能夠檢測到講話人語音的角度以及距離),如圖:

五、其他
關于demo的測試源碼以及sonar驅動原理可以參考blog:基于US-100超聲波在dragonboard 410c Linux上的超聲波驅動編寫










評論