霍爾傳感器的工作原理、檢測方法、特性參數(shù)及其優(yōu)點用途

霍爾傳感器是基于霍爾效應(yīng)的一種磁敏傳感器。將通有電流的物體放在磁場中,如果電流方向與磁場方向互相垂直,則在與磁場和電流方向都垂直的方向上會產(chǎn)生橫向電勢差,這個現(xiàn)象稱為霍爾效應(yīng),產(chǎn)生的電勢差稱為霍爾電壓。采用產(chǎn)生霍爾效應(yīng)顯著的半導(dǎo)體材料制成霍爾器件,作為霍爾傳感器中的磁電轉(zhuǎn)換元件,可以進行電磁測量,如測量磁場、電流、電功率等磁物理量和電量。霍爾傳感器還可以利用磁場作為媒介,對很多物理量實現(xiàn)非接觸式測量,通過轉(zhuǎn)換測量力、位移、振動、加速度、轉(zhuǎn)速、流量等非電量,廣泛應(yīng)用于工業(yè)、交通、通信、自動控制、家用電器等各個領(lǐng)域。
本文引用地址:http://www.104case.com/article/201710/365247.htm 
霍爾傳感器的工作原理
霍爾電流傳感器是根據(jù)霍爾原理制成的。它有兩種工作方式,即磁平衡式和直式。霍爾電流傳感器一般由原邊電路、聚磁環(huán)、霍爾器件、(次級線圈)和放大電路等組成。
直放式電流傳感器(開環(huán)式)
眾所周知,當(dāng)電流通過一根長導(dǎo)線時,在導(dǎo)線周圍將產(chǎn)生一磁場,這一磁場的大小與流過導(dǎo)線的電流成正比,它可以通過磁芯聚集感應(yīng)到霍爾器件上并使其有一信號輸出。這一信號經(jīng)信號放大器放大后直接輸出,一般的
額定輸出標(biāo)定為4V。
磁平衡式電流傳感器(閉環(huán)式)
磁平衡式電流傳感器也稱補償式傳感器,即主回路被測電流Ip在聚磁環(huán)處所產(chǎn)生的磁場通過一個次級線圈,電流所產(chǎn)生的磁場進行補償, 從而使霍爾器件處于檢測零磁通的工作狀態(tài)。
磁平衡式電流傳感器的具體工作過程為:當(dāng)主回路有一電流通過時,在導(dǎo)線上產(chǎn)生的磁場被聚磁環(huán)聚集并感應(yīng)到霍爾器件上, 所產(chǎn)生的信號輸出用于驅(qū)動相應(yīng)的功率管并使其導(dǎo)通,從而獲得一個補償電流Is。 這一電流再通過多匝繞組產(chǎn)生磁場 ,該磁場與被測電流產(chǎn)生的磁場正好相反,因而補償了原來的磁場, 使霍爾器件的輸
出逐漸減小。當(dāng)與Ip與匝數(shù)相乘 所產(chǎn)生的磁場相等時,Is不再增加,這時的霍爾器件起指示零磁通的作用 ,此時可以通過Is來平衡。被測電流的任何變化都會破壞這一平衡。 一旦磁場失去平衡,霍爾器件就有信號輸出。經(jīng)功率放大后,立即就有相應(yīng)的電流流過次級繞組以對失衡的磁場進行補償。從磁場失衡到再次平衡,所需的時間理論上不到1μs,這是一個動態(tài)平衡的過程。
磁場中有一個霍爾半導(dǎo)體片,恒定電流I從A到B通過該片。在洛侖茲力的作用下,I的電子流在通過霍爾半導(dǎo)體時向一側(cè)偏移,使該片在CD方向上產(chǎn)生電位差,這就是所謂的霍爾電壓。
霍爾電壓隨磁場強度的變化而變化,磁場越強,電壓越高,磁場越弱,電壓越低,霍爾電壓值很小,通常只有幾個毫伏,但經(jīng)集成電路中的放大器放大,就能使該電壓放大到足以輸出較強的信號。若使霍爾集成電路起傳感作用,需要用機械的方法來改變磁感應(yīng)強度。下圖所示的方法是用一個轉(zhuǎn)動的葉輪作為控制磁通量的開關(guān),當(dāng)葉輪葉片處于磁鐵和霍爾集成電路之間的氣隙中時,磁場偏離集成片,霍爾電壓消失。這樣,霍爾集成電路的輸出電壓的變化,就能表示出葉輪驅(qū)動軸的某一位置,利用這一工作原理,可將霍爾集成電路片用作用點火正時傳感器。霍爾效應(yīng)傳感器屬于被動型傳感器,它要有外加電源才能工作,這一特點使它能檢測轉(zhuǎn)速低的運轉(zhuǎn)情況。
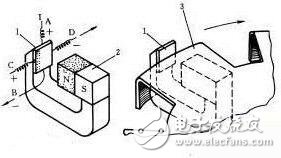
1-霍爾半導(dǎo)體元件 2-永久磁鐵 3-擋隔磁力線的葉片
霍爾傳感器的主要特性參數(shù)
前面介紹過了霍爾傳感器是一種根據(jù)霍爾效應(yīng)制作的磁場傳感器,它的主要特性參數(shù)有以下幾類。
(1)輸入電阻R
霍爾傳感器元件兩激勵電流端的直流電阻稱為輸入電阻。它的數(shù)值從幾歐到兒百歐,視不同型號的元件而定。
溫度升高,輸入電阻變小,從而使輸入電流變大,最終引起霍爾傳感器電勢變化。為了減少這種影響,最好采用恒流源作為激勵源。
(2)輸出電阻R
兩個霍爾傳感器電勢輸出端之間的電阻稱為輸出電阻,它的數(shù)位與輸入電阻同一數(shù)量級。它也隨溫度改變順改變。選擇適當(dāng)?shù)呢?fù)載電阻易與之匹配,可以使由溫度引起的程水電勢的漂移減至最小。
(3)最大激勵電流I---霍爾傳感器參數(shù)
由于霍爾傳感器電勢隨激勵電流的增大而增大,故在應(yīng)用中總希望選用較大的激勵電流1M但激勵電流增大,程爾元件的功耗增大,元件的溫皮升高,從而引起霍爾傳感器屯勢的溫漂增大,因此每種型號的幾件均規(guī)定了相應(yīng)的最大激勵電流,它的數(shù)值從幾毫安至幾百毫安。
(4)靈敏度K
靈敏度KH=EH/IB,它的數(shù)值約為10MV(MA.T)左右。
(5)最大磁感應(yīng)強度BM---霍爾傳感器參數(shù)
磁感應(yīng)強度超過BM時,霍爾傳感器電勢的非線性誤差將明顯增大,特斯撿(T)成幾千高斯(Gs)(1Gs=104T)。
(6)個等位電勢
在額定激勵電流F,當(dāng)外加磁場為零時它是由于4個屯極的幾何尺寸不對稱引起的誤差。
(7)霍爾傳感器屯勢溫度系數(shù)
6M的數(shù)值一般為零點刀霍爾傳感器輸出端之間的開路電壓稱為不等位電勢,使用時多采用電橋法來補償不等位電勢引起日在一定磁感應(yīng)強度和激勵電流的作用下,溫度每變化1攝氏度時,霍爾傳感器電勢變化的百分?jǐn)?shù)弱為霍爾傳感器電勢溫度系數(shù),它與霍爾傳感器元件的材料有關(guān)。

霍爾傳感器的檢測
電流傳感器是檢測用電線路電流的一件電氣件,它輸出的信號根據(jù)不同的需要場合,送入其它的執(zhí)行電路,進一步顯示電流值和控制其它電器。
電流傳感器主要特性參數(shù)
1、標(biāo)準(zhǔn)額定值和額定輸出電流
標(biāo)準(zhǔn)額定值的大小與傳感器產(chǎn)品的型號有關(guān)。 電流傳感器額定輸出電流,一般為10~400mA。
2、 偏移電流
偏移電流也叫殘余電流或剩余電流,它主要是由霍爾元件或電子電路中運算放大器工作狀態(tài)不穩(wěn)造成。
3、 線性度
線性度決定了傳感器輸出信號(副邊電流IS)與輸入信號(原邊電流IP)在測量范圍內(nèi)成正比的程度。
4、 溫度漂移
5、 過載
電流傳感器的過載能力是指發(fā)生電流過載時,在測量范圍之外,原邊電流仍會增加,而且過載電流的持續(xù)時間可能很短,而過載值有可能超過傳感器的允許值,過載電流值傳感器一般測量不出來,但不會對傳感器造成損壞。
6、 精度
電流傳感器的精度取決于標(biāo)準(zhǔn)額定電流。評定傳感器精度時還必須考慮偏移電流、線性度、溫度漂移的影響。
如你是使用者,注意規(guī)格型號就可以了。
霍爾傳感器的優(yōu)點及其用途
在科學(xué)實驗和工業(yè)應(yīng)用的很多場合,需要對電流和電壓進行測量和控制,特別是在一些需要對大電流和高電壓測量和控制以及對所測電流和電壓要求較高精確度的情況下,需要使用安全、方便可靠精確度較高的電流電壓傳感器。早期,人們采用分流器和分壓器的方法來實現(xiàn)對電流和電壓的檢測,但這種方法無法對主回路進行隔離測量,這種方法使用不安全、精確度低。后來人們又發(fā)明了互感器,它與直接分流、分壓的方法相比,實現(xiàn)了主回路進行隔離檢測,無疑是一大進步,但它的應(yīng)用范圍比較窄,只適用于50Hz 正弦波的工頻檢測,對于其它波形電流、電壓的測量它就無能為力了。
隨著電力電子技術(shù)的發(fā)展,原有的電流檢測元件(如分流器、互感器)已不能滿足中、高頻,高di/dt,寬頻譜電流波形的傳遞,霍爾電流電壓傳感器是彌補這一空缺的、有著廣泛應(yīng)用范圍和前景的主要檢測元件。霍爾電流電壓傳感器與普通互感器相比有著下面的特點:
1. 測量范圍廣:它可以測量任意波形的電流和電壓,如直流、交流、脈沖、三角波形等,甚至對瞬態(tài)峰值電流、電壓信號也能忠實地進行反映;
2. 響應(yīng)速度快:最快者響應(yīng)時間只為1us。
3. 測量精度高:其測量精度優(yōu)于1%,該精度適合于對任何波形的測量。普通互感器是感性元件,接入后影響被測信號波形,其一般精度為3%~5%,且只適合于50Hz 正弦波形。
4. 線性度好:優(yōu)于0.2%
5. 動態(tài)性能好:響應(yīng)時間快,可小于1us;普通互感器的響應(yīng)時間為10~20ms。
6. 工作頻帶寬:在0~100KHz 頻率范圍內(nèi)的信號均可以測量。
7. 可靠性高,平均無故障工作時間長:平均無故障時間》5 10 小時
8. 過載能力強、測量范圍大:0---幾十安培~上萬安培
9. 體積小、重量輕、易于安裝。
由于霍爾電流電壓傳感器以上的優(yōu)點,故而可廣泛應(yīng)用與變頻調(diào)速裝置、逆變裝置、UPS 電源、逆變焊機、電解電鍍、數(shù)控機床、微機監(jiān)測系統(tǒng)、電網(wǎng)監(jiān)控系統(tǒng)和需要隔離檢測電流電壓的各個領(lǐng)域中。霍爾器件具有許多優(yōu)點,它們的結(jié)構(gòu)牢固,體積小,重量輕,壽命長,安裝方便,功耗小,頻率高(可達(dá)1MHZ),耐震動,不怕灰塵、油污、水汽及鹽霧等的污染或腐蝕。
霍爾線性器件的精度高、線性度好;霍爾開關(guān)器件無觸點、無磨損、輸出波形清晰、無抖動、無回跳、位置重復(fù)精度高(可達(dá)μm級)。取用了各種補償和保護措施的霍爾器件的工作溫度范圍寬,可達(dá)-55℃~150℃。
按被檢測的對象的性質(zhì)可將它們的應(yīng)用分為:直接應(yīng)用和間接應(yīng)用。前者是直接檢測出受檢測對象本身的磁場或磁特性,后者是檢測受檢對象上人為設(shè)置的磁場,用這個磁場來作被檢測的信息的載體,通過它,將許多非電、非磁的物理量例如力、力矩、壓力、應(yīng)力、位置、位移、速度、加速度、角度、角速度、轉(zhuǎn)數(shù)、轉(zhuǎn)速以及工作狀態(tài)發(fā)生變化的時間等,轉(zhuǎn)變成電量來進行檢測和控制。
位移測量
兩塊永久磁鐵同極性相對放置,將線性型霍爾傳感器置于中間,其磁感應(yīng)強度為零,這個點可作為位移的零點,當(dāng)霍爾傳感器在Z軸上作△Z位移時,傳感器有一個電壓輸出,電壓大小與位移大小成正比。
力測量
如果把拉力、壓力等參數(shù)變成位移,便可測出拉力及壓力的大小,按這一原理可制成的力傳感器。
角速度測量
在非磁性材料的圓盤邊上粘一塊磁鋼,霍爾傳感器放在靠近圓盤邊緣處,圓盤旋轉(zhuǎn)一周,霍爾傳感器就輸出一個脈沖,從而可測出轉(zhuǎn)數(shù)(計數(shù)器),若接入頻率計,便可測出轉(zhuǎn)速。
線速度測量
如果把開關(guān)型霍爾傳感器按預(yù)定位置有規(guī)律地布置在軌道上,當(dāng)裝在運動車輛上的永磁體經(jīng)過它時,可以從測量電路上測得脈沖信號。根據(jù)脈沖信號的分布可以測出車輛的運動速度。












評論