基于AVR單片機的節能機器人電梯,軟硬件協同

一、項目概述
1.1 引言
隨著社會的發展,高層建筑和智能化建筑的不斷出現,作為垂直運輸工具的電梯得到了越來越廣泛的應用,人們對電梯服務質量及可靠運行提出了越來越高的要求。在2010年4月22日電梯行業“節能·安全·智能”技術交流會上中國電梯協會副秘書長張樂祥提出節能、安全、智能已成為電梯技術發張的主流,驅動與控制系統仍存在改善空間,遠程監控維修技術成為焦點。
本文在節能方面運用電梯群控分配控制技術,以能量消耗作為主要指標把侯梯和乘梯時間作為模型約束建立數學模型,另外如果持續3 分鐘沒有轎廂、層站召喚,電梯將自動關閉照明及風扇,并降低梯廳位置顯示器的亮度,從而大幅度減少待機電力消耗;在安全和智能方面通過對電梯的各種狀態進行實時監控,同時對電梯運行過程中可能出現的各種故障進行預測、診斷和報警。
因此,此項目開發是基于 AVR處理器的智能電梯控制器,并融合CAN總線技術、多媒體技術、智能控制技術、優化調度技術、故障預測與診斷等技術。在硬件上,選用32位AVR處理器作為電梯控制器的核心CPU,在軟件上,選用Linux操作系統作為電梯核心控制器的軟件平臺。
1.2 項目背景/選題動機
隨我國城市化建設的迅猛發展和物質文化生活質量迅速提高,建筑業日益發展壯大。為建筑物內提供上下交通運輸的電梯工業也迅速發展起來。電梯不僅是生產運輸的主要設備,更是人們生活和工作中必備的交通工具。和汽車一樣、已成為人們頻繁使用的交通運輸設備。
近年來,我國每年新增電梯均在15%以上,因此我國的電梯節能有許多潛力可挖。我國的電梯生產量、需求量已經占到全球50%以上,而電梯節能技術的研究基礎比較薄弱。電梯要實現整體節能,與樓宇的電梯配置方案也密切相關。目前我國有許多樓宇都存在電梯的無效耗能。例如,一棟樓配置了多臺電梯但卻沒有采用普通的并聯、群控技術或目的選層群控技術,導致多臺電梯向同方向運行的無效耗能。因此為了提高高層建筑中多部電梯的運行效率和服務質量,需要用電梯群控管理系統來進行合理的調度和管理。
然而近些年電梯安全事故時有發生,整個行業不得不深入分析。就電梯事故的原因,我們需要對電梯故障及時檢測,就能有效地預防電梯事故的發生,減少對人們造成的危害。
為了實現上述功能,我們融入了“節能環保”的理念,設計了“基于AVR單片機的節能機器人電梯”。
二、需求分析
2.1 功能要求
(1)當電梯3分鐘沒有接收呼梯信號時,電梯自動關閉照明及風扇。
(2)當電梯運行速度超過一定值時,發送報警信號到遠程控制系統
(3)當電梯斷電時,發送斷電信號到遠程控制系統
(4)當轎廂內報警按鈕按下時發送信號至遠程控制系統,遠程控制系統接收到信息后由遠程控制系統端的工作人員發送信號到轎廂點亮報警指示燈。
(5)當電梯的重量超過一定值時,電梯停止啟動,并發出報警聲音
(6)電梯轎廂外顯示屏上能夠顯示電梯目前所在層數、所呼叫電梯等待時間
(7)電梯轎廂內顯示屏上能夠顯示電梯當前運行方向(電梯向上運行時,向上運行指示燈點亮;電梯向下運行時,向下運行指示燈點亮)、當前所在層數、電梯到達目的層的的時間
(8)當多個呼梯信號同時發出時,電梯能夠通過群控器進行最優配置,并且有轎廂外顯示屏顯示所分配電梯
2.2 性能要求
1)現場數據采集器連續采集現場數據,并有效傳輸
2)群控--模糊神經網絡算法模型,能耗率低
3) 設備具有數據通信、電源管理和設備監控的功能
4)設備具有視窗化人機界面和綜合監控應用軟件
5)系統工作穩定且兼容性強,核心控制和遠程控制聯動便利,易維護
三、方案設計
3.1 系統功能實現原理
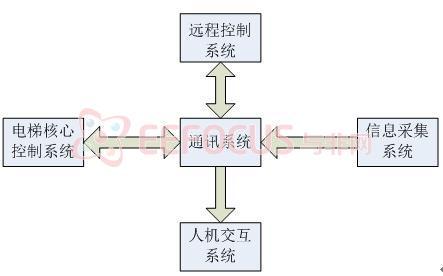
系統架構圖
(一)信息采集系統
該系統主要用于采集電梯的運行狀態、電梯故障信息、樓層號、呼梯信號、開關門信號以完成電梯基本控制功能,并將這些信息通過CAN總線發送到決策系統(監視工作站、群控器)進行處理及時作出響應。
關于信息采集各模塊的信息如下表所示:
信息采集模塊 | 應檢測的信息 | 實現方法 | 備注 |
運行狀態信息 | 速度 | 結合其他檢測到的信息來判斷 | 電梯的運行狀態主要包括:正常運行、故障、休眠狀態(長時間沒有呼梯信號時電梯處于休眠狀態) |
故障信息 | 速度異常、停電、關人 | 檢測速度是否異常:光電傳感器;檢測是否停電:電流傳感器;檢測是否關人:故障按鈕 | 通過采集速度、電流等來分析沖頂、蹲底、停電、關人等常見的電梯故障 |
電梯的位置信息 | 電梯所在的樓層號 | 光電編碼器 | 用于檢測發生故障時電梯所在的位置 |
呼梯信號 | 電梯的廳層召喚信號、轎內召喚信號 | 召喚按鈕 | ------------------------------------------------------- |
開關門信號 | 開門、關門 | 開關門按鈕 | ---------------------------------------------------- |
承載量信息 | 重量 | 壓力傳感器 | 檢測電梯是否超重 |
(二)通訊系統
由于采用了AVR32單片機作為核心控制器,其開發板上已有兩個CAN接口,因此通過使用CAN總線控制器比較方便。
CAN現場總線技術通過利用現場傳感器用于采集現場電梯各種信號,并通過CAN通訊卡與決策系統相連。電梯核心控制系統可以通過CAN網絡和各個數據采集節點通訊,實現各種數據參數的采集及數據的初步分析,并與遠程控制系統通過Internet技術進行數據傳輸:通過計算機數據處理中心對現場采集的數據進行深層次的綜合分析,另外計算機數據處理中心也可以通過Internet網絡對電梯運行狀態進行遠程監測。
運用Internet技術和分布在各地的電梯所在的局域網把每臺電梯連接起來,也就是讓電梯上網,通過Intertnet實時傳送電梯的工作狀態和工作參數。可以變被動保養為主動保養,使用戶的故障停梯時間大大縮減。同時電梯遠程監控系統的故障信息記錄數據庫能夠方便地使維保中心建立起一套電梯運行、故障及維修檔案庫,被保養電梯何時出現故障、維修人員何時到現場、電梯如何恢復正常等數據都會記錄在數據庫中。可以對某臺電梯,某組群控電梯,或某一特定時間段的電梯故障及維修情況進行統計。維保中心的操作人員可以通過監控軟件定期對數據庫進行數據整理、統計和報表打印等工作。
系統硬件以高性能的嵌入式微處理器AVR32 AT32UC3A,其中的Internet控制器和DSP模塊為核心來設計通信系統中的以太網模塊,并在AVR32單片機中的DSP模塊用軟件實現TCP/PI協議棧,使AVR32芯片具備上網功能,從而可以用監控系統服務器通過AVR32單片機與遠程終端進行大量數據交換。DSP主要完成數據的解包和封裝。當有數據從Internet控制器傳輸過來時,DSP對數據包進行分析,如果是ARP數據包,程序轉入ARP處理程序。如果是PI數據包,通過判斷PI數據包的類型,轉入相應的CIMP處理程序和TCP處理程序,數據解包后,將需要的數據保存。當DSP發送數據時,則將數據進行層層封裝,發送到AVR Internet模塊緩沖區,Internet控制器將數據封裝成以太網數據幀后通過以太網接口輸出到局域網中。
通訊系統結構框圖如下:
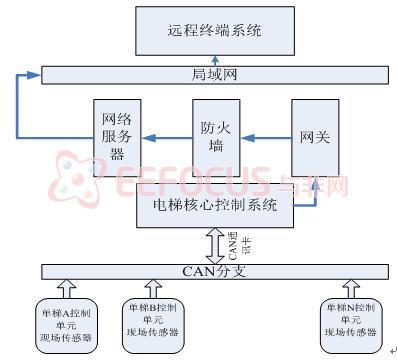
通訊系統結構框圖
(三)電梯核心控制系統
電梯核心控制系統負責將采集到的電梯各部分數據(包括電梯運行數據、狀態信息等)進行處理以完成電梯基本控制功能,同時將處理后的相關信息經通訊模塊傳輸給遠程控制系統和人機交互系統。當電梯發生故障時,將電梯信息通過各個電梯的主控制器的故障診斷算法進行現場的電梯故障診斷,并將診斷后的故障信息送給遠程監視系統。當電梯接收到呼梯信號時,將呼梯信息發送給群控制器,經群控制器分析處理后發送分梯信號進行電梯調度。對于基本控制功能,電梯核心控制系統通過CAN總線方式從電梯內部控制網絡上掛接的外呼、操縱盤和門機單元采集呼梯、開關門按鈕和門狀態信息,并實時點亮應響應的呼梯燈,以實現對呼梯系統的控制。核心控制器還通過脈沖接收裝置接收光電編碼器傳輸過來的脈沖信息,以實現對電梯的定位。
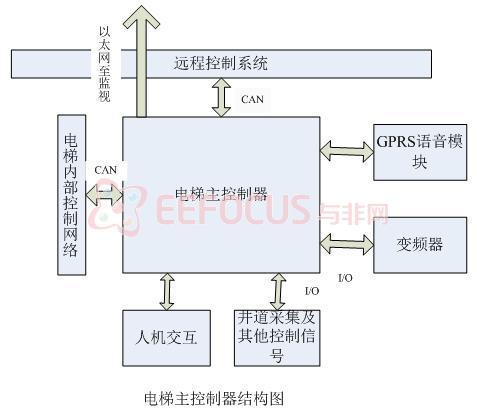
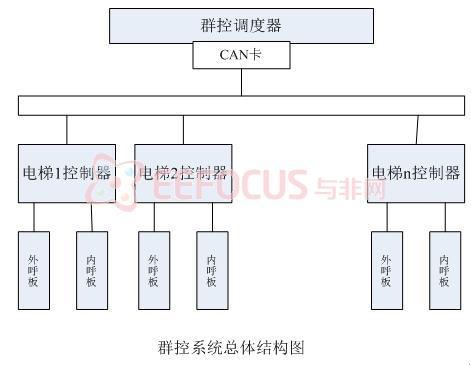
在智能方面,電梯核心控制系統可實現監視、群控、GPRS報警等功能。其中,以三臺電梯為例,核心控制系統分為一個群控制器和三個電梯主控制器,這四個控制器均由AVR單片機構成,其中三個電梯主控制器與群控器、監視工作站的通信方式有兩種,一種是三者位于同一個網絡中,我們通過另一條CAN總線(異于電梯內部的CAN控制網絡)將群控制器和主控制器掛接在一起;另一種是群控和監視信息分別在不同的網絡中傳輸,其中核心控制器與群控器通過CAN總線方式實現通信,而監視信息可通過以太網方式由電梯主控制器傳輸給遠程監控系統。為兼容這兩種方式,控制器在設計時將同時考慮CAN通信和以太網通信兩種方式。
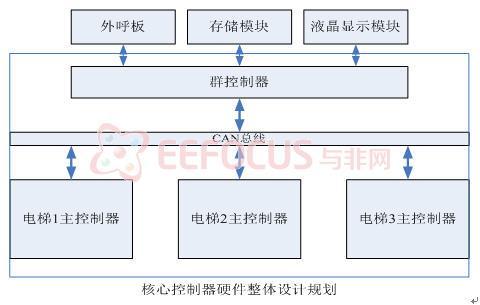
群控制器除了與三臺電梯主控制器通過CAN總線通信,還連接了外呼板模塊、存儲模塊、液晶顯示模塊。存儲模塊存儲大量數據處理信息。外呼板模塊將呼梯信號傳送給群控制器,群控制器經過模糊神經網絡算法得出最節能的電梯行駛路徑,并將算出結果反饋給液晶顯示模塊,達到人機交互的作用。
GPRS功能可用于向遠程維修服務器或遠程維修人員以無線方式發送報警信號及相關的故障信息。為方便電梯的管理與配置。我們可以通過LED段碼管顯示電梯當前位置,通過鍵盤輸入對電梯的參數進行配置,通過具有中文顯示功能的LCD顯示屏建立電梯的配置界面,并可用于故障信息的實時顯示。
電梯主控制器結構圖如下:
群控系統總體結構圖如下:
(四)遠程控制系統
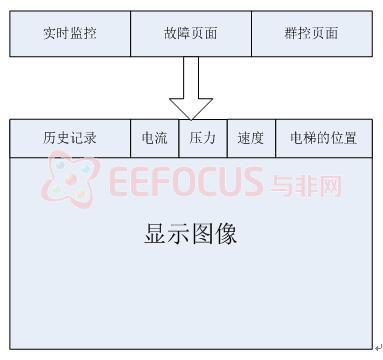
該系統主要用于遠程監控,專業人員根據頁面上顯示的相關信息及時處理。
電梯正常情況下處于群控狀態和休眠狀態,一旦發生故障,便會自動報警,并主動轉到故障頁面,顯示故障原因、電梯所在的位置,工作人員及時聯系維修人員及其醫護人員。
頁面顯示圖如下:
(五)人機交互系統
每個單梯系統安裝一個24層的電梯操縱盤。操縱盤放置在轎廂內門的右側,轎廂內無輔助操縱盤。操縱盤上的主要功能如下:
1)1-24層指令按鈕及指示燈
2)開關門、門保持按鈕
3)電梯運行狀態顯示(樓層以及據目的樓層的時間顯示)
4)報警按鈕及指示燈
報警按鈕是乘客被困在轎廂內時用來呼救和與外界聯系的工具,轎廂先將報警信號傳遞給電梯核心控制系統,此信號經過電梯核心控制系統的故障檢測模塊處理后再經由通信系統傳至遠程控制系統。遠程控制系統接收到信號后再發送新信號到轎廂內去點亮指示燈告訴被困人員,工作人員已獲知被困消息來安撫被困人員。
3. 2 硬件平臺選用及資源配置
(一)硬件平臺選用
EVK1105是一個基于AVR32 AT32UC3A單片機控制器的評估套件和開發系統。它配備一系列豐富的外設、內存,并且可充分開發AVR32設備的全部潛能。其開發板圖如下所示:

• 支持AT32UC3A
• 以太網端口
• 傳感器:光照、溫度、電位器
• 4x20藍色LCD(PWM變頻背光)
• JTAG連接器、Nexus、USART、USB 2.0接口,TWI接口、SPI。
• SD和MMC讀卡器
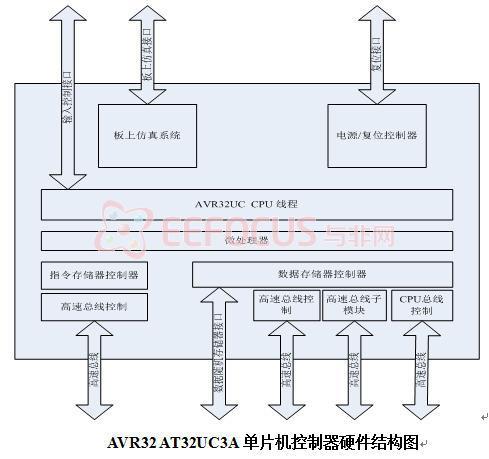
AVR32 AT32UC3A單片機控制器硬件結構圖
(二)AVR Studio 5 開發軟件
·智能編譯器
·400個演示工程
·支持8位或32位AVR
·便捷的用戶手冊和用戶指南
3.3系統軟件架構
(1)電梯控制軟件總體結構
一、內核層:操作系統內核和庫提供了各種機制,這些機制包括了內存的管理、線程調度、線程同步等,這些機制是電梯核心控制器嵌入式軟件的核心,所有的任務都在這些機制的統一管理下有序地實現各自的功能。
二、接口層(驅動程序):驅動程序屬于操作系統的一部分,包括了各模塊中所有設備的驅動,例如:以太網驅動、SPI驅動、CAN節點的驅動,GPIO的驅動、計數器的驅動、人機交互模塊中段碼管、鍵盤和LCD的驅動。它們負責直接與硬件打交道,實現CPU與各設備的數據交互。
三、應用層:這部分處于整個結構的頂層,由用戶直接根據所要實現的具體功能編寫實現,每個任務由一個線程來實現。應用程序的開發可分為三個模塊:
(1)數據塊模塊:存放歷史數據
(2)通信模塊:分為以太網模塊、CAN通信模塊、SPI通信模塊。以太網模塊采用TCP / IP協議,通過Sock2et通信與參數設定板按照自定義的數據格式進行通信,完成電梯參數的設定(包括電梯的時間參數、距離參數、功能性參數等一百多個參數的設定);CAN通信模塊,完成與內、外召板直接的通信,主要用來傳輸樓層信息、樓層字符的顯示、開關門到位等一系列的控制信息;SP I通信模塊主要用來作為與輔助MCU的通信,該通信包括:編碼器的值、電梯的狀態信息、時鐘數據
(3)控制模塊:控制模塊是整個系統的核心,該模塊包括電梯的三大模式:正常模式、故障模式、群控模式。正常模式包括電梯單梯運行時的相關程序和跑層算法;故障模式包括電梯在出現故障時做出反應,確保電梯安全運行;群控模式包括多梯運行時使得耗能最少,達到節能環保的目的。
軟件架構圖如下:

軟件架構圖
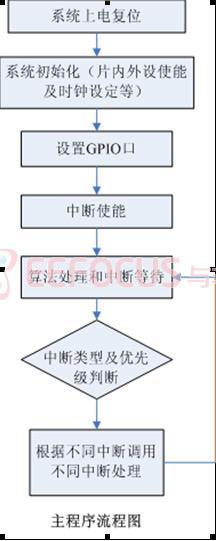
3.4 系統軟件流程
該系統選用Linux操作系統作為電梯核心控制器的軟件平臺。應用層是整個系統的核心控制層。我們在該層實現電梯的主要功能,采用優先調度的算法,實現電梯各種運行狀態間的轉換。一旦出現故障系統便轉換到故障模塊對各種故障進行處理;存在呼梯信號時系統便轉換到群控模塊;長時間沒有接收到呼梯信號時系統便轉換到休眠狀態。
該系統的主程序和故障模塊流程圖如下:
(1)主程序流程圖如下:
(2)故障模塊
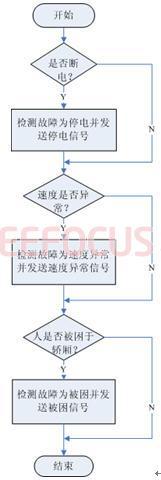
故障模塊流程圖
(3)群控模塊:
電梯群控系統派梯調度算法流程如下:
(1)更新呼梯信號序列,通過交通流模式識別模塊獲取當前交通流模式并確定調度策略。
(2)通過交通流數據采集模塊獲取當前電梯運行狀態數據。
(3)對呼梯信號序列中的每一個呼梯信號計算其每臺電梯響應的可信度。
(4)當電梯發生客流量或呼梯信號變動則跳轉到(1)

電梯群控系統調度圖
3.4 系統預計實現結果
(1)在遠程控制系統的監視器上能夠準確的顯示每個電梯的壓力、電流、速度等信號變化圖像
(2)遠程控制系統能夠實時監控電梯情況
(3)遠程控制系統能得到電梯的能耗情況
(4)轎廂顯示屏能顯示當前電梯運行狀態
(5)轎廂顯示屏能顯示電梯運行時預估計到達目的層的時間
(6)報警成功時報警指示燈能成功被點亮



評論