技術(shù)大講堂:怎樣進(jìn)行運(yùn)動(dòng)目標(biāo)檢測?

運(yùn)動(dòng)目標(biāo)檢測的任務(wù)就是將序列圖像中變化區(qū)域從背景中分割出來得到運(yùn)動(dòng)矢量信息,從而能夠?qū)\(yùn)動(dòng)目標(biāo)進(jìn)行進(jìn)一步的分類和識(shí)別。
本文引用地址:http://www.104case.com/article/201706/352354.htm
表1. 運(yùn)動(dòng)目標(biāo)檢測方法比較表
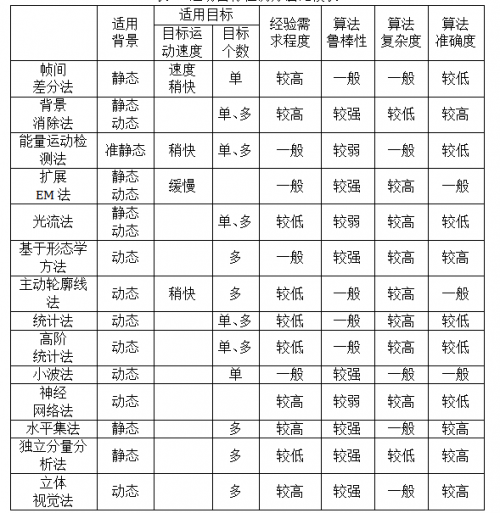
表2常用運(yùn)動(dòng)目標(biāo)檢測算法比較
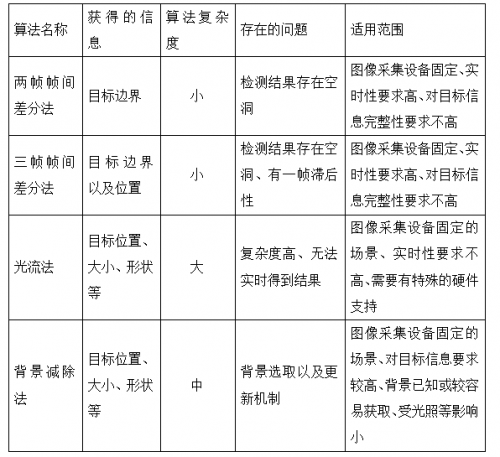
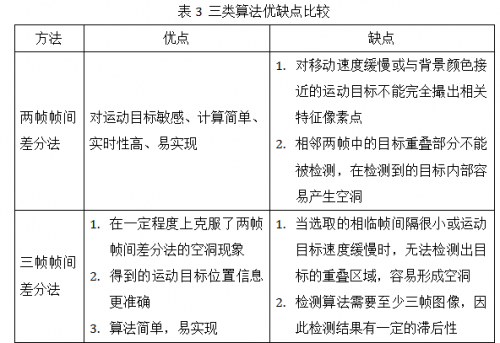
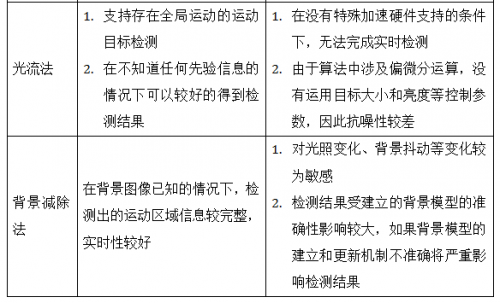
表3三類算法優(yōu)缺點(diǎn)比較
ViBe算法假定當(dāng)前待分類的像素點(diǎn)為v(x),比較方法是定義一個(gè)二維歐式空間(C1,C2),并在該空間上定義一個(gè)以v(x)為中心半徑為R的球,根據(jù)預(yù)先建立的背景模型

通過以下公式進(jìn)行計(jì)算:

得到的結(jié)果如果大于2,則v(x)被劃分為背景,否則為前景,該過程如圖1所示。
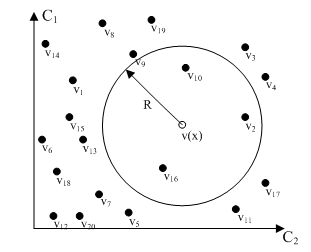
圖1基于隨機(jī)理論背景模型更新準(zhǔn)則的示意圖
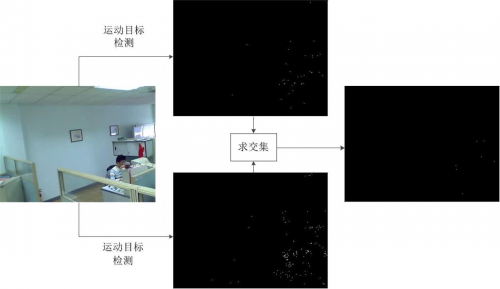
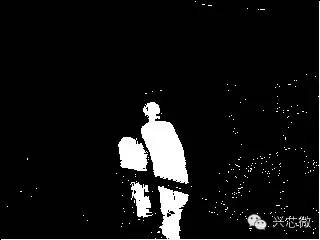
圖2 圖像序列中無運(yùn)動(dòng)目標(biāo)時(shí)利用兩次運(yùn)動(dòng)檢測結(jié)果求交集結(jié)果示意圖
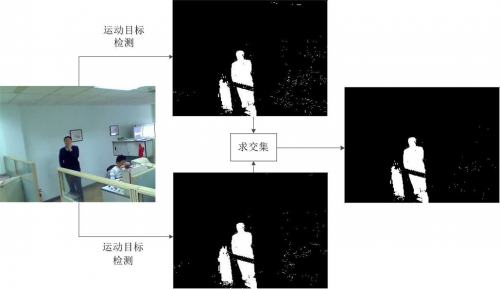
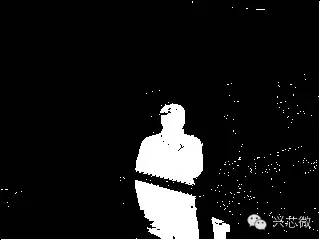
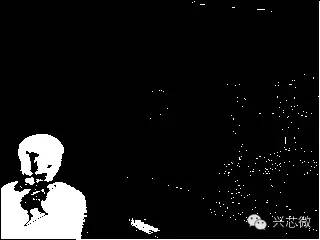
圖3 圖像序列中出現(xiàn)運(yùn)動(dòng)目標(biāo)時(shí)利用兩次運(yùn)動(dòng)檢測結(jié)果求交集結(jié)果示意圖





評論