多通道微量注射泵的設計實現方案

0 引言
本文引用地址:http://www.104case.com/article/201706/350194.htm微量注射泵是臨床醫療和生命科學研究中經常使用的一種長時間進行微量注射的儀器,這種儀器主要應用于動靜脈輸液,輸血和精密化學實驗。現今國內外微量注射泵的主要問題是精度不高,而且一般只實現單通道勻速注射。而有些場合如食品檢測色譜分析中往往要求勻變速注射試劑。因此設計勻加速或勻減速注射泵,并且聯動控制多臺注射泵,實現人機對話數據處理是非常有必要的。
1 系統概述
如圖1所以,系統可以分為計算機軟件控制模塊、主控制芯片模塊、步進電機驅動模塊、傳感器模塊等4個模塊。

計算機通過RS 232串口與主控制芯片模塊連接,通過自主設計的監控軟件,可以實時監控和管理注射泵的工作狀態,運行后可以實現全自動化處理。主控制芯片模塊由ARM和FPGA以及外圍電路組成,FPGA產生步進電機所需要的電脈沖信號,傳送給驅動器模塊,驅動器模塊里的脈沖分配器把電脈沖信號按規定的方式分配給電機各相勵磁繞組,從而帶動步進電機轉子運轉。與此同時安裝在電機軸上的增量式旋轉編碼器和壓力傳感器實時監控電機的實際工作情況,由于FPGA具有硬件實時處理的特點,傳感器的數據會同步傳給FPGA,當旋轉編碼器已經停止編碼,而FPGA在發送脈沖信號,則會馬上停止電機運轉并蜂鳴報警,進入堵轉狀態;在壓力傳感器測得壓力超過最大限壓時,也會馬上停止電機工作,且計算機提示和蜂鳴報警。
2 硬件設計
2.1 主控制芯片模塊
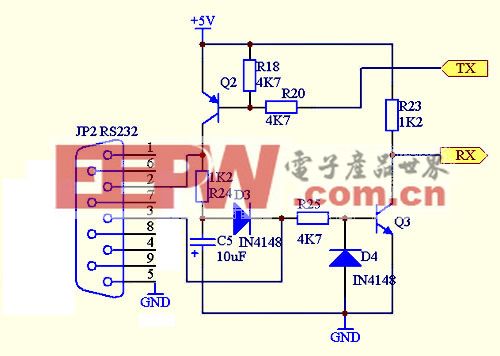
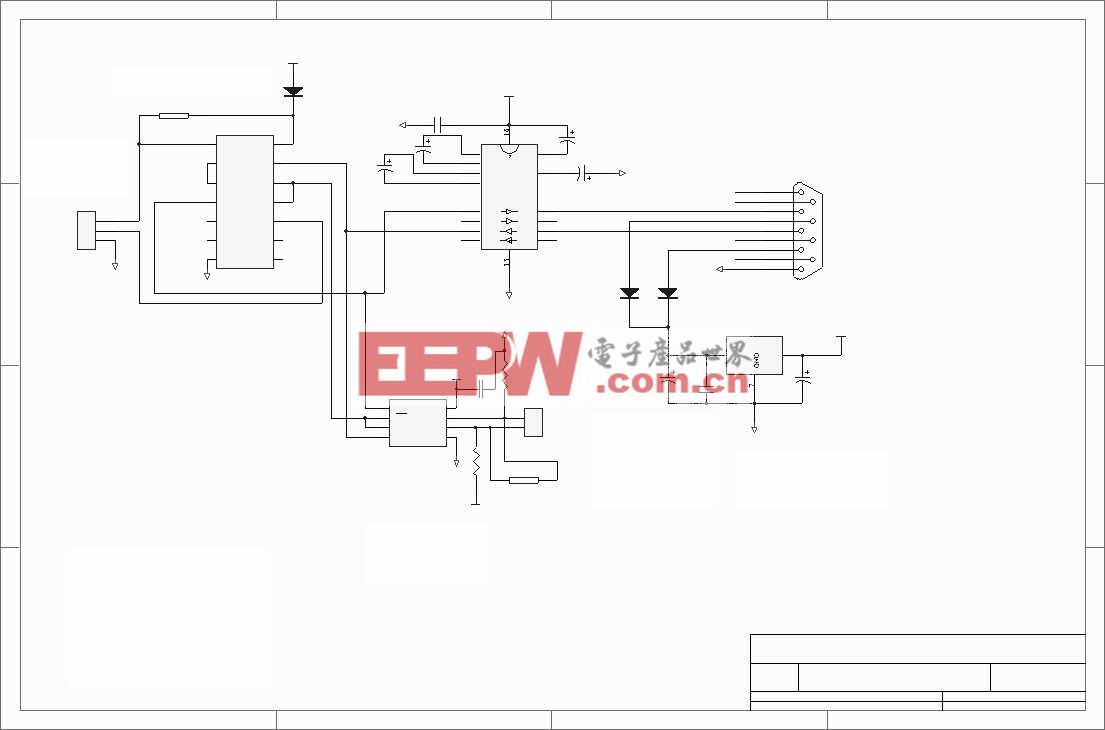
如圖2所示,主控模塊采用ARM和FPGA相結合的方式。ARM嵌入式處理器主要負責人機接口和對外通信并對總的進程進行管理,FPGA實現并行控制多路步進電機和對傳感器的實時處理。其外圍電路包括:液晶模塊、鍵盤輸入模塊、電源模塊、RS 232接口轉換模塊、報警模塊。

ARM采用意法半導體(ST)公司推出的基于ARMCorrex M3內核的STM32F103處理器。它集32位RISC處理器,低功耗、高性能模擬技術、高速DMA通道及豐富的片內外設、JTAG仿真調試于一體。在性能上,CorrexM3內核采用ARM V7體系結構,指令速度可接近80 MIPS,具有強大的數據處理能力和運算能力。
FPGA(即現場可編輯門陣列)采用的是Attera公司生產的CYCLONE II系列。EP2C5。FPGA采用獨特的并行運算電路,在一個控制核心中可以加入多個控制對象進行獨立驅動,控制性能不受到影響,各控制對象間不會產生干擾,避免了多對象實時控制中繁瑣的時序設計問題,正好符合設計中同時控制多臺注射泵的要求,一定程度上提高系統的集成度和抗干擾能力。同時FPGA具有硬件實時處理能力,每個硬件都例化在FPGA里面,等效于旋轉編碼器和壓力傳感器都成為了FPGA的一個硬件塊,因此,其處理速度會非常快。
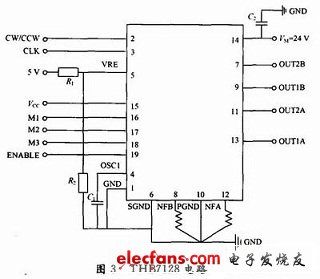
步進電機驅動采用三洋公司生產的THB7128驅動芯片,它具有高細分,大功率的特點。THB7218為雙全橋MOSFET驅動,最高耐壓為DC 40 V,大電流3.3 A(峰值),具有自動半流鎖定功能,內置混合式衰減模式。相比其他驅動芯片,該苡片最突出的特點是最高達到1/128細分,因此電機運轉非常平穩。THB7128電路圖如圖3所示。
2.3 傳感器模塊
2.3.1 旋轉編碼器
本系統的閉環控制采用了光電式旋轉編碼器。經過充分的市場調研,選擇了日本OMRON公司生產的E6A2系統編碼器。它結構簡單,體積小,精度高,響應速度快,性能穩定,特別在高分辨率和大量程角速率/位移測量系統中,更具優越性。旋轉編碼器按照信號和原理分成增量式和絕對式兩種,本系統采用增量式編碼器。
它由主碼盤、鑒相盤、光學系統和光電變換器組成。在主碼盤(光電盤)周邊上刻有節距相等的輻射狀窄帶,形成均勻分布的透明區和不透明區。鑒相盤與主碼盤平行,并刻有a,b兩組透檢測窄縫,它們彼此錯開1/4節距,以使A,B兩個光電變換器的輸出信號在相位上相差90°。工作時,鑒相盤靜止,主碼盤和轉軸轉動,光投射到主碼盤和鑒相盤上,當主碼盤上的透明區與窄縫對齊時,光電變換器輸出電壓最大,當不透明區與窄縫對齊時,電壓最小。因此主碼盤每轉過一個刻線周期,光電變換器將輸出一個近似的正弦波電壓,且變換器A,B相位差為90°。為了判斷碼盤的絕對位置,還必須設置一個基準點,即“零位標志槽”。碼盤每轉一圈,零位標志槽對應的光敏元件產生一個脈沖,稱為“一轉脈沖”。
2.3.2 壓力傳感器
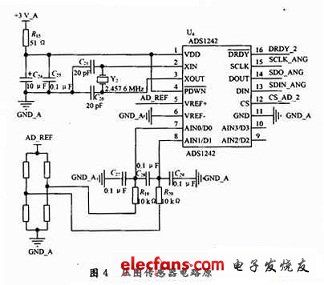
本系統采用電阻應變式壓力傳感器。其工作原理是將一種電阻應變片粘貼在各種彈性敏感元件上,當彈性敏感元件受到外力的作用時將產生應變,電阻應變片將應變再轉化為電阻的變化,然后電阻變化值通過數模轉換成為壓力變化值。圖4為壓力傳感器的應用電路圖,由4個壓敏電阻組成惠斯通電橋電路,無差壓時,電橋兩臂平等,差壓信號加到4個陶瓷壓敏電阻上時,壓敏電阻的阻值隨差壓變化,引起電橋失衡。電橋失衡引起電流的變化,通過ADS1242芯片進行數模轉換,把模擬信號轉化為數字信號,再傳至主控芯片。
通過Visual C++6.0開發工具編寫的上位機軟件如圖5所示,上位機通過串口RS 232與主控制芯片模塊連接。軟件分為初始設置欄、系統狀態欄、聯動控制欄3個部分。
在軟件里設置初始參數:開始速度、結束速度、運行時間、注射器的規格后,然后點擊運行,注射泵即開始工作。工作時在系統狀態欄里可查看到當前狀態,如當前速度、已注射量、已運行時間、工作狀態(加速、減速、勻速、停止),運行完畢后蜂鳴器會長鳴提示。兩臺注射泵可聯動控制,也可以單獨控制,目前已做到6臺聯動控制。
加減速方法:步進電機的工作原理是每接收到一個脈沖信號,它就按設定的方向轉動一個固定的角度(步進角),通過脈沖個數和脈沖頻率及可控制電機的位移和速度。采用階梯曲線來逼近加、減速曲線,如圖6所示為直線(勻加速)的離散化處理,同理可采用離散法離散加、減速指數曲線和其他曲線。當t越小,步進電機的精度越高。控制脈沖頻率及控制電機速度,本系統采用定時器中斷的方式產生不同頻率的脈沖,實際上是改變定時器裝載值的大小。有兩種方法可改變裝載值,一種是查表法,先計算好各個階梯的頻率值并換算成定時器的裝載值,把它做成表;另外一種就是在每個階梯運算期間,主程序計算好下一階梯的裝載值,因此這要求處理器有足夠的資源和處理速度,本系統由于采用STM32F103處理器,具有足夠的處理速度和運算能力,所以采取這種方法。
4 結語
本文闡述了將先進電子技術、傳感器技術、計算機技術綜合應用于注射泵系統的研究與開發,設計了具有勻加減速注射功能的注射泵,并且可以聯動控制多臺注射泵工作,利用計算機良好的人機對話界面和數據處理功能實現自動化控制。該系統已成功應用于湖南師范大學化學化工學院島津實驗室的色譜分析樣品前處理系統中。勻加減速注射泵目前在國內尚無上市產品,該系統具有廣泛的市場前景。
.











評論