函數(shù)信號(hào)發(fā)生器和示波器二合一儀器設(shè)計(jì),提供源碼

1.總體設(shè)計(jì)方案
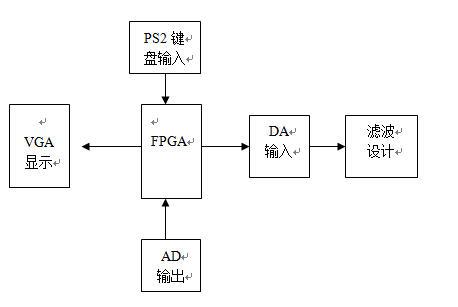
1.1 主控制模塊
方案一:采用單片機(jī)。單片機(jī)的應(yīng)用較為廣泛,但是單片機(jī)的處理頻率達(dá)不到我們的要求。所以我們只能夠使用處理速度較快的處理器。
方案二:采用Xilinx的FPGA來實(shí)現(xiàn)主控制器。Xilinx的FPGA的內(nèi)部IP核可以方便的產(chǎn)生DDS波形,這樣就方便我們能夠更好的產(chǎn)生想要的波形。
所以采用方案二。
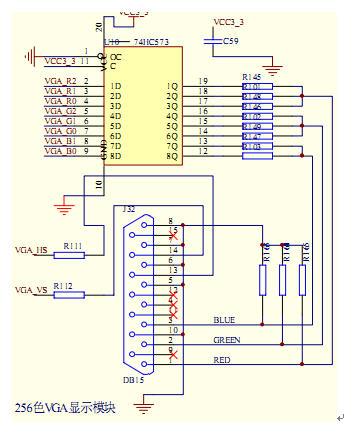
1.2顯示模塊
方案一:使用TFT觸摸屏。彩屏有這樣明顯的優(yōu)點(diǎn):微功耗,尺寸小,超薄輕巧,顯示信息量大,字跡美觀,視覺舒適,但是對(duì)于FPGA來說,其實(shí)現(xiàn)對(duì)觸摸屏的控制不能夠較好的完成控制要求。
方案二:使用VGA顯示。FPGA可以實(shí)現(xiàn)對(duì)VGA的控制。VGA的使用較為廣泛,且價(jià)格在接收的范圍之內(nèi)。而且,對(duì)于FPGA來說,實(shí)現(xiàn)對(duì)VGA接口的控制比控制其他的顯示器更加的方便和快捷。這就節(jié)省了我們的設(shè)計(jì)麻煩。
所以采用方案二。
1.3 輸入模塊
方案一:使用矩陣鍵盤。矩陣鍵盤的編碼較為簡答,且可以實(shí)現(xiàn)較為復(fù)雜的控制。但是矩陣鍵盤的按鍵過少,不能夠?qū)崿F(xiàn)更多數(shù)據(jù)的輸入。
方案二:使用PS2鍵盤。PS2鍵盤的控制更為簡單,我們可以通過兩根數(shù)據(jù)線精心數(shù)據(jù)的讀取,且PS2鍵盤的設(shè)計(jì)更加符合我們?cè)O(shè)計(jì)要求,這就決定了PS2在本設(shè)計(jì)中的優(yōu)勢。
故采用方案二。

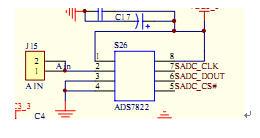
1.4 AD輸出模塊
ADS7822是一種單片高速12位逐次比較型A/D轉(zhuǎn)換器, ADS7822內(nèi)置雙極性電路構(gòu)成的混合集成轉(zhuǎn)換顯片,具有外接元件少,功耗低,精度高等特點(diǎn),并且具有自動(dòng)校零和自動(dòng)極性轉(zhuǎn)換功能,只需外接少量的阻容件即可構(gòu)成一個(gè)完整的A/D轉(zhuǎn)換器。所以該方案采用ADS7822作為AD輸入的元器件。
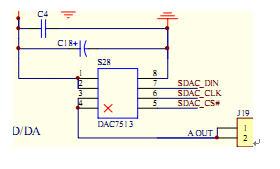
1.5 DA輸出模塊
DAC7513是8分辨率的D/A轉(zhuǎn)換集成芯片。與微處理器完全兼容。這個(gè)DA芯片以其價(jià)格低廉、接口簡單、轉(zhuǎn)換控制容易等優(yōu)點(diǎn),在單片機(jī)應(yīng)用系統(tǒng)中得到廣泛的應(yīng)用。D/A轉(zhuǎn)換器由8位輸入鎖存器、8位DAC寄存器、8位D/A轉(zhuǎn)換電路及轉(zhuǎn)換控制電路構(gòu)成。
2.程序設(shè)計(jì)
2.1 AD輸出

--**********************分頻進(jìn)程*************************
process(clk)
variable cnt1 : integer range 0 to 100;
variable cnt2 : integer range 0 to 20;
begin
if clkevent and clk=1 then
if cnt1=100 then
cnt1:=0;
if cnt2=20 then
cnt2:=0;
clock=not clock;
if(cnt=3)then
cnt=0;
else
cnt=cnt+1;
end if;
else
cnt2:=cnt2+1;
end if;
else
cnt1:=cnt1+1;
end if;
end if;
end process;
--**************狀態(tài)驅(qū)動(dòng)進(jìn)程**********************
sync :process(clock,reset)
begin
if(reset = 0) then
current_state = start;
elsif(clockevent and clock=1) then
current_state = next_state;
end if;
end process sync;
--***************adc驅(qū)動(dòng)進(jìn)程*******************
comb :process(current_state, intr)
begin
case current_state is
when start => --啟動(dòng)狀態(tài)
next_state = convert;
cs = 0;
wr = 0;
rd = 1;
read_data = 0;
when convert =>--初始化
if(intr = 0) then
next_state = read1;
else
next_state = convert;
end if;
cs = 1;
wr = 1;
rd = 1;
read_data = 0;
when read1 =>--讀狀態(tài)1
next_state = read2;
cs = 0;
wr = 1;
rd = 0;
read_data = 1;
when read2 =>--讀狀態(tài)2
next_state = start;
cs = 1;
wr = 1;
rd = 1;
read_data = 0;
when others =>--其他狀態(tài)
next_state = start;
end case;
end process comb;
--****************讀取AD數(shù)據(jù)********************
get_data: process(clock,reset)
begin
if(reset = 0) then
p=0;
elsif(clockevent and clock=1) then
if(read_data = 1) then
p=conv_integer(data_i);
end if;
end if;
end process;
2.2 DA輸出
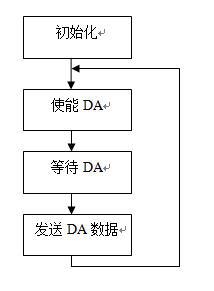
--*********************65536Hz分頻進(jìn)程************************
process(clk)
variable cnt1 : integer range 0 to 762;
begin
if clkevent and clk=1 then
case cnt1 IS
WHEN 381 =>
cp_65k=1;
cnt1:=cnt1+1;
WHEN 762=>
cnt1:=0;
cp_65k=0;
cp_wr=0;
WHEN 20=>
cp_wr=1;
cnt1:=cnt1+1;
WHEN OTHERS=>
cnt1:=cnt1+1;
end case;
end if;
end process;
--*********************1kHz分頻進(jìn)程************************
process(cp_65k)
variable cnt1 : integer range 0 to 64;
begin
if cp_65kevent and cp_65k=1 then
case cnt1 is
when 32=>cp_1k=1;
cnt1:=cnt1+1;
when 64=>cnt1:=0;
cp_1k=0;
when others=>cnt1:=cnt1+1;
end case;
end if;
end process;
--**************DDS地址累加器進(jìn)程**********************
PROCESS(cp_65k)
BEGIN
IF(cp_65kEVENT AND cp_65k=1) THEN
--DDS累加器循環(huán)累加dds_m
IF dds_add65535 THEN
dds_add=dds_add+dds_m;
ELSE
dds_add=dds_add+dds_m-65536;
END IF;
END IF;
END PROCESS;
--***********************頻率加減控制進(jìn)程***************************
process(cp_1k)
VARIABLE keys:INTEGER RANGE 0 TO 127 :=0; --消抖累加器
begin
if cp_1k=1 then
case key is
when 10=> --頻率加
if keys=127 then
keys:=0;
bell=1;
if dds_m=1000 then
dds_m=1;
else
dds_m=dds_m+1;
end if;
else
keys:=keys+1;
end if;
when 01=> --頻率減
if keys=127 then
keys:=0;
bell=1;
if dds_m=1000 then
dds_m=1;
else
dds_m=dds_m-1;
end if;
else
keys:=keys+1;
end if;
when others=>bell=0;
end case;
end if;
end process;
end dac;
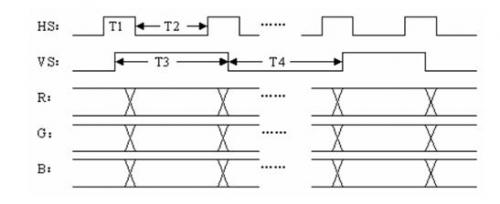
2.3 VGA顯示
3.性能指標(biāo)
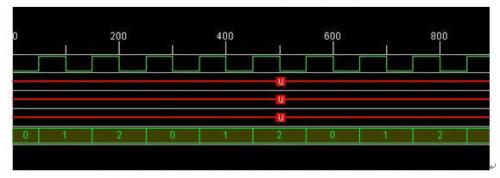
DA輸出的波形
4.總結(jié)
經(jīng)過了多日的努力,我們?cè)诒驹O(shè)計(jì)中基本實(shí)現(xiàn)了上述要求,并在有些功能方面提出了改進(jìn),使系統(tǒng)設(shè)計(jì)更加完善。在該設(shè)計(jì)中我們使用了FPGA作為主控器,但由于時(shí)間及器材條件的限制,本設(shè)計(jì)也存在不足,例如,測量范圍不能達(dá)到更高的要求,測量精度也存在很大的提升空間。我們會(huì)在以后的學(xué)習(xí)中不斷地彌補(bǔ)這些不足,完善測量系統(tǒng)設(shè)計(jì)。












評(píng)論